Устройство и принцип действия ДПТ
Электрические двигатели постоянного тока (ДПТ) отличает от других двигателей наличие специального механического коммутатора – коллектора. Несмотря на то, что из-за этого ДПТ менее надежны и дороже двигателей переменного тока, имеют большие габариты, они находят применение, когда их особые свойства имеют решающее значение. Часто ДПТ обладают преимуществами перед двигателями переменного тока по диапазону и плавности регулирования частоты вращения, по перегрузочной способности и экономичности, по возможности получения характеристик специального вида, и т.д.
В настоящее время ДПТ применяют в электроприводах прокатных станов, различных подъемных механизмов, металлообрабатывающих станков, роботов, на транспорте и т.д. ДПТ небольшой мощности используют в различных автоматических устройствах.
Устройство и принцип действия ДПТ
Внешний вид двигателя постоянного тока показан на рис. 1, а его поперечный разрез в упрощенном виде – на рис. 2. Как и любая электрическая машина, он состоит из двух основных частей – статора и ротора. Статор неподвижен, ротор вращается. Статор состоит из массивного стального корпуса 1, к которому прикреплены главные полюсы 2 и дополнительные полюсы 4. Главные полюсы 2 имеют полюсные наконечники, служащие для равномерного распределения магнитной индукции по окружности якоря. На главных полюсах размещают обмотки возбуждения 3, а на дополнительных – обмотки дополнительных полюсов 5.
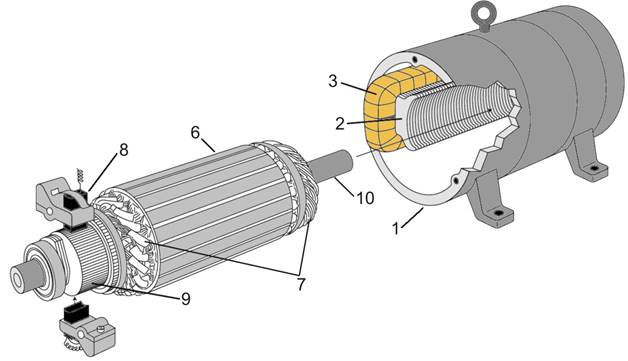
Рис. 1. Внешний вид двигателя постоянного тока
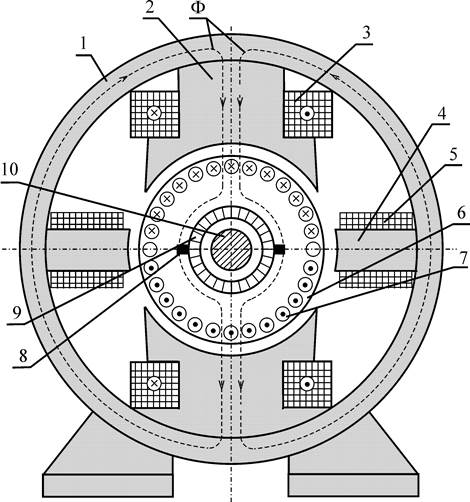
Рис. 2. Поперечный разрез ДПТ (условное изображение): 1 – корпус; 2 – главные полюсы; 3 – обмотка возбуждения; 4 – дополнительные полюсы; 5 – обмотка дополнительных полюсов; 6 – якорь; 7 – обмотка якоря; 8 – щетки; 9 – коллектор; 10 – вал.
В пазах, расположенных на поверхности якоря 6, размещается обмотка якоря 7, выводы от которой присоединяют к расположенному на валу 10 коллектору 9. К коллектору с помощью пружин прижимаются графитные, угольно-графитные или медно-графитные щетки 8.
Обмотка возбуждения машины питается постоянным током и служит для создания основного магнитного поля, показанного на рис. 2 условно с помощью двух силовых линий, изображенных пунктиром. Дополнительные полюсы 4 уменьшают искрение между щетками и коллектором. Обмотку дополнительных полюсов 5 соединяют последовательно с обмоткой якоря 7 и на электрических схемах часто не изображают. На рис. 2 показана машина постоянного тока с двумя главными полюсами. В зависимости от мощности и напряжения машины могут иметь и большее число полюсов. При этом соответственно увеличивается число комплектов щеток и дополнительных полюсов.
У ДПТ с независимым возбуждением, как показано на рис. 3, электрические цепи обмоток якоря 1 и возбуждения 2 электрически не связаны и подключаются к различным источникам питания с напряжениями и . Как правило, . В общем случае последовательно с якорной обмоткой и обмоткой возбуждения могут быть включены дополнительные резисторы rд и rр (см. рис.3). Их назначение будет пояснено далее.
Двигатели относительно небольшой мощности обычно изготавливают на одинаковые напряжения и . В этом случае цепи обмоток якоря и возбуждения соединяют между собой параллельно и подключают к общему источнику питания с напряжением . Такие ДПТ называют двигателями параллельного возбуждения. Если мощность источника питания значительно превышает мощность двигателя, то процессы в якорной обмотке и в обмотке возбуждения протекают независимо. Поэтому такие двигатели являются частным случаем ДПТ независимого возбуждения и их свойства одинаковы.
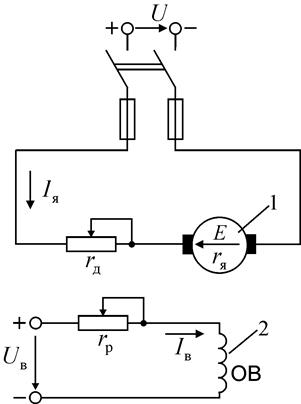
Рис. 3. Электрическая схема подключения ДПТ независимого возбуждения: 1 – цепь обмотки якоря; 2 – цепь обмотки возбуждения.
При подключении двигателя к источнику питания в обмотке якоря протекает ток Iя, который взаимодействует с магнитным полем, создаваемым обмоткой возбуждения. В результате этого возникает электромагнитный момент, действующий на якорь
где k – коэффициент, зависящий от конструктивных параметров машины; Ф – магнитный поток одного полюса.
При превышении моментом М момента сопротивления нагрузки Мс якорь начинает вращаться с угловой скоростью w и в нем наводится ЭДС
У двигателей полярность ЭДС Е противоположна полярности напряжения источника U, поэтому с ростом скорости w ток Iя уменьшается
где rя – сопротивление якорной цепи двигателя при rд = 0.
Из соотношения (1) следует, что это приводит к снижению электромагнитного момента. При равенстве моментов и скорость вращения якоря перестает изменяться. Чтобы изменить направление вращения двигателя следует изменить полярность напряжения . Это приведет к изменению направления тока и направления момента . Двигатель начнет замедляться, а затем разгонится в обратную сторону.
Пуск двигателя
В первое мгновение при пуске скорость двигателя w = 0 и в соответствии с формулой (2) ЭДС якоря Е = 0. Поэтому при подключении якоря двигателя к напряжению пусковой ток якоря , как следует из формулы (3), ограничивается только сопротивлением якорной цепи rя (при rд=0)
Значение сопротивления относительно невелико (обычно в пределах 1 Ом), поэтому если напряжение близко по значению к номинальному напряжению, значение пускового тока может в (10–30) раз превышать номинальное значение тока двигателя . Это недопустимо, поскольку ведет к сильному искрению и разрушению коллектора, а при частых пусках возможен перегрев обмотки якоря.
Как следует из формулы (4), одним из вариантов ограничения пускового тока является увеличение суммарного сопротивления якорной цепи ДПТ при неизменном значении напряжения U. Для этого последовательно с якорем включают дополнительный пусковой реостат (на рис. 3 не показан), который обычно выполняют в виде нескольких ступеней. Ступени пускового реостата выключают поэтапно по мере увеличения скорости двигателя. При этом в якоре двигателя за время пуска могут выделяться значительные потери мощности.
Более экономичным способом снижения пускового тока является пуск ДПТ при плавном увеличении напряжения на якоре U по мере разгона двигателя и увеличения ЭДС Е. Как следует из выражения (3), можно подобрать такой темп увеличения напряжения U, при котором ток на протяжении всего времени пуска не будет превышать допустимого значения. В лабораторной установке, используемой при выполнении данной работы, используется именно этот более экономичный способ ограничения пускового тока.
Двигатель постоянного тока независимого возбуждения (ДПТ НВ)

Двигатель постоянного тока независимого возбуждения (ДПТ НВ) В этом двигателе (рисунок 1) обмотка возбуждения подключена к отдельному источнику питания. В цепь обмотки возбуждения включен регулировочный реостат rрег, а в цепь якоря — добавочный (пусковой) реостат Rп. Характерная особенность ДПТ НВ — его ток возбуждения Iв не зависит от тока якоря Iя так как питание обмотки возбуждения независимое.
Схема двигателя постоянного тока независимого возбуждения (ДПТ НВ)
Механическая характеристика двигателя постоянного тока независимого возбуждения (ДПТ НВ)
Уравнение механической характеристики двигателя постоянного тока независимого возбуждения имеет вид

где: n0 — частота вращения вала двигателя при холостом ходе. Δn — изменение частоты вращения двигателя под действием механической нагрузки.
Из этого уравнения следует, что механические характеристики двигателя постоянного тока независимого возбуждения (ДПТ НВ) прямолинейны и пересекают ось ординат в точке холостого хода n0 (рис 13.13 а), при этом изменение частоты вращения двигателя Δn, обусловленное изменением его механической нагрузки, пропорционально сопротивлению цепи якоря Rа =∑R + Rдоб. Поэтому при наименьшем сопротивлении цепи якоря Rа = ∑R, когда Rдоб = 0, соответствует наименьший перепад частоты вращения Δn. При этом механическая характеристика становится жесткой (график 1).

Механические характеристики двигателя, полученные при номинальных значениях напряжения на обмотках якоря и возбуждения и при отсутствии добавочных сопротивлений в цепи якоря, называют естественными рисунок 13.13, а (график 1 Rдоб = 0 ).
Если же хотя бы один из перечисленных параметров двигателя изменен (напряжение на обмотках якоря или возбуждения отличаются от номинальных значений, или же изменено сопротивление в цепи якоря введением Rдоб), то механические характеристики называют искусственными .
Искусственные механические характеристики, полученные введением в цепь якоря добавочного сопротивления Rдоб, называют также реостатными (графики 2 и 3).
При оценке регулировочных свойств двигателей постоянного тока наибольшее значение имеют механические характеристики n = f(M). При неизменном моменте нагрузки на валу двигателя с увеличением сопротивления резистора Rдоб частота вращения уменьшается. Сопротивления резистора Rдоб для получения искусственной механической характеристики, соответствующей требуемой частоте вращения n при заданной нагрузке (обычно номинальной) для двигателей независимого возбуждения:

где U — напряжение питания цепи якоря двигателя, В; Iя — ток якоря, соответствующий заданной нагрузке двигателя, А; n — требуемая частота вращения, об/мин; n0 — частота вращения холостого хода, об/мин.
Частота вращения холостого хода n0 представляет собой пограничную частоту вращения, при превышении которой двигатель переходит в генераторный режим. Эта частота вращения превышает номинальную nном на столько, на сколько номинальное напряжение Uном подводимое к цепи якоря, превышает ЭДС якоря Ея ном при номинальной нагрузки двигателя.


На форму механических характеристик двигателя влияет величина основного магнитного потока возбуждения Ф. При уменьшении Ф (при возрастании сопротивления резистора rpeг) увеличивается частота вращения холостого хода двигателя n0 и перепад частоты вращения Δn. Это приводит к значительному изменению жесткости механической характеристики двигателя (рис. 13.13, б). Если же изменять напряжение на обмотке якоря U (при неизменных Rдоб и Rрег), то меняется n0, a Δn остается неизменным [см. (13.10)]. В итоге механические характеристики смещаются вдоль оси ординат, оставаясь параллельными друг другу (рис. 13.13, в). Это создает наиболее благоприятные условия при регулировании частоты вращения двигателей путем изменения напряжения U, подводимого к цепи якоря. Такой метод регулирования частоты вращения получил наибольшее распространение еще и благодаря разработке и широкому применению регулируемых тиристорных преобразователей напряжения.
Используемая литература: — Кацман М.М. Справочник по электрическим машинам
Электрический двигатель постоянного тока, устройство и принцип действия электродвигателей постоянного тока
Электрические машины востребованы для работы оборудования разного назначения. Агрегаты встречаются в бытовых и промышленных устройствах. Для получения большой механической мощности с возможностью управления частотой вращения спросом пользуется двигатель постоянного тока (ДПТ или DC двигатели).
Устройство и принцип действия
Внешне двигатель постоянного тока представлен компактным моноблочным устройством с клеммами для подключения. На выходе вал, через который передается крутящий момент рабочему механизму.
Электрическая машина состоит из двух основных компонентов:
- Статор. Неподвижный элемент двигателя с обмоткой для возбуждения электродвижущей силы (ЭДС). У статора противоположно расположено два постоянных магнита с разными полюсами.
- Ротор. Вращающийся элемент ДПТ, который преобразует электромагнитную силу в механическую энергию.
На роторе присутствует токопроводящая обмотка с концами на щетках. Они являются контактами, на которые подается электроэнергия. Поток заряженных частиц через обмотку проходит по касательной постоянный магнит статора, возбуждая электродвижущую силу. Она приводит в действие ротор, который вращается с постоянной скоростью.
Направление потока электрических зарядов векторное и прямое, поэтому ротор двигателя немного прокрутится и остановится. Для непрерывного вращения на его конце установлена токопроводящая пластина (ламель).
Но одной ламели недостаточно, т.к. после проворачивания ротора на 180 °C на пути будет магнит с обратной полярностью. И чтобы якорь не вращался «туда-сюда», ламели расположены по всей окружности конца ротора в виде неподвижного щеточного коллектора на подшипниках скольжения. Независимо от текущего положения ротора, в любой момент вращения возле магнита всегда будет ламель, принимающая постоянный ток.
За свою конструкцию такие машины называются коллекторными электродвигателями. Они первыми были разработаны и до сих пор в спросе. Агрегаты долговечны, поддерживают регулировочную скорость вращения ротора. Все электрические машины постоянного тока — синхронные двигатели. Называются они так по причине одинаковой скорости вращения магнитного поля и ротора.
С развитием электроники появились DC двигатели без щеточного коллектора. Постоянный ток подается на статор, а закрепленные на роторе постоянные магниты начинают вращать якорь. С конструктивной стороны такие машины более сложные и имеют узкое назначение. Используются в условиях, в которых применение коллекторных электродвигателей не оправдано.

Способы возбуждения ЭДС ДПТ
Благодаря низкой себестоимости коллекторные электромоторы распространены в недорогих бытовых устройствах. Но их мощности недостаточно для крупногабаритного оборудования. Поэтому в промышленности применяются машины с обмоткой на статоре (вместо постоянного магнита). По классификации агрегаты отличаются способом возбуждения ЭДС.
Последовательное возбуждение
Обмотка возбуждения на статоре и на якоре питаются от одного источника постоянного тока. Сначала он проходит по статору, а когда он поступит на ротор, уже будет действовать ЭДС. Это самая удачная схема запуска двигателя — можно обеспечить плавный пуск машины и доступна регулировочная скорость вращения.
Но есть и существенный недостаток — возбуждаемое магнитное поле растет лишь с повышением постоянного тока. Поэтому для получения высокой скорости подается больше мощности. В результате часто происходят искрения и перегорания ламелей. При использовании двигателей с последовательным возбуждением приходится выбирать между производительностью и долговечностью.
Параллельное возбуждение
Поток частиц идет от одного источника одновременно на обмотки статора и ротора ДПТ. Напряжение будет одинаковым, а вот сила распределяться между проводниками. Машины с такой конфигурации самые простые в производстве и компактны. Концы проводников статора и ротора подсоединены напрямую к щеткам. Нет дополнительных соединений обмоток между собой (которое есть при последовательном возбуждении).
Но с увеличением силы заряда на обмотке возбуждения, на якоре будет спад, и наоборот. Поэтому электродвигатели постоянного тока с параллельным возбуждением могут работать лишь с одной скоростью. Они часто используются в насосах магистральных трубопроводов, которые работают под конкретным напором.
Независимое возбуждение
На якорь и статор подается напряжение от разных источников питания. Такая схема позволяет обеспечить плавный пуск, т.к. при увеличении скорости вращения возбужденное поле не меняется. И это значительно продлевает ресурс машины.
У электродвигателей постоянного тока с независимым возбуждением только один недостаток — частый выход из строя якоря. Это связано с тем, что при перегрузках ЭДС не меняется (т.к. она возбуждается иным источником, не задействованным при регулировании оборотов ротора). Оператор может заметить дефекты в работе только когда уже становится поздно (сильный шум, запах перегоревшей изоляции).
Смешанное (комбинированное) возбуждение
У таких машин несколько катушек возбуждения с разным соединением. Электродвигатели сложны и функциональны. Они применяются в условиях, когда требуется бесперебойная работа, а сохранность агрегата вторична.
Например, при штатной работе задействуется обмотка возбуждения, которая параллельно соединена с проводником якоря, и ротор вращается с одной скоростью. А в момент перебоев на генераторе или подстанции подача тока переключается на другую катушку, у которой независимое от якоря возбуждение. Электродвигатели постоянного тока со смешанным возбуждением не встречаются в бытовых устройствах. В зависимости от режима работы по факты такие агрегаты могут иметь классификацию.
Способы эксплуатации
Электрически е DC машины постоянного тока могут работать в прямом и обратном порядке. В результате их можно использовать в качестве генераторов путем преобразования механической силы в электрическую энергию.
Режим электродвигателя
Подаваемый постоянный ток преобразовывается в механическую силу вращения ротора, которую можно использовать в разных целях:
- перекачка газообразных и жидких сред;
- транспортировка и подъем грузов;
- обработка материалов разной прочности.
Электрическая машина постоянного тока находит широкое применение только от одного вращения, но и это не предел ее возможностей. У преобразования линейная зависимость — обороты зависят от напряжения (чем оно выше, тем их больше на единицу времени). Такая зависимость позволяет использовать две опции:
- Регулирование скорости вращения. С помощью частотного преобразователя меняется напряжение, а за ним прямо пропорционально растут или падают обороты. Это позволяет использовать оборудование более эффективно (менять напор перекачки, ускорять подъем более легких грузов и т. д.).
- Плавный запуск. Пусковой ток подается не сразу базовым напряжением, а с постепенным его увеличением до требуемого значения. Также можно обеспечить плавный переход при переключении скорости вращения. Эта функция значительно сокращает износ машины от резких вращений.
С развитием электроники стало возможным регулировать вращение ротора двигателей постоянного тока под управлением других устройств, делая его работу автономной:
- Термостат у котла задает скорость вращения насоса, при которой в трубах будет достигнута нужная температура.
- Аварийная система обесточивает агрегат при его перегреве.
- Реле давления останавливает перекачку в магистральных трубопроводах при полном резервуаре, и с его опустением снова запустит машину.
Режим генератора
Принцип заключается в реверсивной работе DC электродвигателя. Под действием механической силы ротор начинает вращаться и генерировать электрический заряд на полюсах. Токосъем происходит подключением сетей к щеткам.
Подавляющее большинство двигателей с работой в режиме генератора действуют в электростанциях. Для движения ротора задействуется течение реки или пар. Крупные перерабатывающие заводы могут обеспечивать себя электроэнергией с нулевой себестоимостью. В качестве механической силы для движения ротора используется побочный продукт в виде струи газа.
Также распространено применение компактных мини-электростанций. Они представлены установкой с двигателем внутреннего сгорания и генератора. Ротор приводится в движение сжиганием бензина или ДТ. Мини-электростанции распространены на строительных промышленных объектах в условиях отсутствия электросетей.
На практике в целях продления срока службы генератора ротор ДПТ всегда работает с минимальной нагрузкой. Ток необходимых характеристик получается подключением выпрямителей, резисторов и инверторов.
Универсальный электродвигатель
Если у машины магнитное поле возбуждения и ротор вращаются с одинаковой скоростью (синхронная машина), он устроен так, что возможно питание от постоянного и переменного тока. Дополнительная обмотка возбуждения проходит не по всему статору, а секционно (по образу с ламелями щеточного коллектора). При включении двигателя в цепь с источником постоянного тока питание подается на основную обмотку статора, а когда от переменного — на дополнительную.
Такой подход позволяет коллекторному двигателю постоянного тока работать от общей сети. Он используется в бытовых приборах с высокой производительностью. Вся причина в том, что переменный ток электросети напряжением 230 В и частотой 50 Гц можно преобразовать во вращение ротора с крутящим моментом не более 3000 об./мин. В обычном режиме оборудование работает от переменного источника питания. Но когда требуется очень высокая скорость вращения механизма, происходит предварительное выпрямление. Ток становится постоянным и после передается на щетки машины.
Достоинства
У электродвигателей постоянного тока много преимуществ, среди которых можно отметить следующее:
- Линейная зависимость преобразования энергии. По характеристикам источника можно заранее рассчитать обороты, с которыми движется ротор (и наоборот для генератора). Это обеспечивает плавным пуском и регулировочной скорость вращения электромотора.
- Универсальная конструкция. Для любых задач подходит коллекторный двигатель, и наладить производство одного вида машин проще.
- Компактность. Синхронные двигатели состоят только из статора и якоря, остальные компоненты незначительны и не почти не влияют на размер агрегата.
Двигатели постоянного тока отлично подходят для предприятий на производстве. Но в быту по ряду качеств они проигрывают основному конкуренту — асинхронным двигателям:
- Меньший рабочий ресурс и требовательность к частому обслуживанию с заменой изношенных частей.
- Сложная конструкция якорей, не позволяющая отремонтировать или заменить их самому.
- Для подключения к общей сети требуется выпрямитель.
По этим причинам в домашних устройствах и бытовых инструментах присутствуют асинхронные двигатели. Их принципиальное отличие в поле возбуждения, которое всегда вращается быстрее ротора. Такие машины устроены так, что работают только от переменного тока.
Типы неисправностей
Двигатели постоянного тока используются для приведения в движение крупногабаритных агрегатов с большой нагрузкой, и где требуется часто менять скорость вращения. Преимущественно это область энергетики и производства с тяжелыми условиями работы, ускоряющими износ мотора. Но даже при бережной эксплуатации возможен выход из строя.
Для двигателей постоянного тока характерны многие поломки, которые можно объединить в 4 типа неисправностей:
- Разрушение изоляции и обмотки. При перегреве или коротком замыкании электромотор получает сильный урон. Изоляция разрушается, а уязвимая часть обмотки деформируется под действием внешнего тепла или роста сопротивления материала проводника. Поломке предшествует перегрев и шумная работа. Принципиальное отличие замыкания от перегрева в том, что неполадка на стороне и ее придется устранить после ремонта агрегата.
- Отсутствие питания. При наличии постоянного тока полный отказ в работе двигателя указывает на обрыв одной или нескольких обмоток. Зачастую такая ситуация происходит в результате повреждения витков из-за неаккуратного обслуживания. В половине случаев обмотку двигателя можно восстановить без замены.
- Постукивания и вибрации. Разбалансировка вала или разрушение подшипников скольжения нарушает синхронную передачу крутящего момента рабочему механизму. В результате происходят многократные толчки между валами, которые еще сильнее вредят электромотору. Возможно механическое разрушение отдельных частей (уцелевших подшипники, ламели коллектора).
- Рабочие характеристики не соответствуют настройкам. Отвечающий за подачу постоянного тока на двигатель механизм неисправен. При повреждении катушки частотного преобразователя изменение скорости вращения ротора не будет соответствовать настройкам. При дефектной работе в режиме генератора токосъем не соответствует требуемым параметрам.
При наблюдении любых признаков неисправности необходимо отключить двигатель и передать его в сервис для ремонта. Дальнейшая эксплуатация мотора постоянного тока под нагрузкой причинит ему еще больше урона или нарушит работу оборудования. Восстановление машины необходимо доверить только специалистам. Только профессионалы способны на определение всех неисправностей и смогут устранить их за короткий срок.
Технический центр «Хельд» ремонтирует электрические моторы постоянного тока и устраняет неисправность любой сложности. Мастера восстанавливают обмотку статора и якоря, меняют подшипники скольжения, делают балансировку ротора. Также мы ремонтируем бытовые и промышленные агрегаты с работой от электродвигателя постоянного тока до 1000 кВт: генераторы, станки, компрессоры, насосы.
Если вам требуется срочное и профессиональное восстановление мотора, обратитесь в нашу компанию. Специалисты быстро изучат состояние машины, найдут все неисправности и сообщат условия ремонта.
Техническое обслуживание
электрических машин © ООО «Хельд ремонт»
ИНН 7811781566
КПП 781101001
Дпт независимого возбуждения что такое
Эра электродвигателей берёт своё начало с 30-х годов XIX века, когда Фарадей на опытах доказал способность вращения проводника, по которому проходит ток, вокруг постоянного магнита. На этом принципе Томасом Девенпортом был сконструирован и испытан первый электродвигатель постоянного тока. Изобретатель установил своё устройство на действующую модель поезда, доказав тем самым работоспособность электромотора.
Практическое применение ДПТ нашёл Б. С. Якоби, установив его на лодке для вращения лопастей. Источником тока учёному послужили 320 гальванических элементов. Несмотря на громоздкость оборудования, лодка могла плыть против течения, транспортируя 12 пассажиров на борту.
Лишь в конце XIX столетия синхронными электродвигателями начали оснащать промышленные машины. Этому способствовало осознание принципа преобразования электродвигателем постоянного тока механической энергии в электричество. То есть, используя электродвигатель в режиме генератора, удалось получать электроэнергию, производство которой оказалось существенно дешевле от затрат на выпуск гальванических элементов. С тех пор электродвигатели совершенствовались и стали завоёвывать прочные позиции во всех сферах нашей жизнедеятельности.
Устройство и описание ДПТ
Конструктивно электродвигатель постоянного тока устроен по принципу взаимодействия магнитных полей.
Самый простой ДПТ состоит из следующих основных узлов:
- Двух обмоток с сердечниками, соединенных последовательно. Данная конструкция расположена на валу и образует узел, называемый ротором или якорем.
- Двух постоянных магнитов, повёрнутых разными полюсами к обмоткам. Они выполняют задачу неподвижного статора.
- Коллектора – двух полукруглых, изолированных пластин, расположенных на валу ДПТ.
- Двух неподвижных контактных элементов (щёток), предназначенных для передачи электротока через коллектор до обмоток возбуждения.
Рассмотренный выше пример – это скорее рабочая модель коллекторного электродвигателя. На практике такие устройства не применяются. Дело в том, что у такого моторчика слишком маленькая мощность. Он работает рывками, особенно при подключении механической нагрузки.
Статор (индуктор)
В моделях мощных современных двигателях постоянного тока используются статоры, они же индукторы, в виде катушек, намотанных на сердечники. При замыкании электрической цепи происходит образование линий магнитного поля, под действием возникающей электромагнитной индукции.
Для запитывания обмоток индуктора ДПТ могут использоваться различные схемы подключения:
- с независимым возбуждением обмоток;
- соединение параллельно обмоткам якоря;
- варианты с последовательным возбуждением катушек ротора и статора;
- смешанное подсоединение.
Схемы подключения наглядно видно на рисунке 2.

Рисунок 2. Схемы подключения обмоток статора ДПТ
У каждого способа есть свои преимущества и недостатки. Часто способ подключения диктуется условиями, в которых предстоит эксплуатация электродвигателя постоянного тока. В частности, если требуется уменьшить искрения коллектора, то применяют параллельное соединение. Для увеличения крутящего момента лучше использовать схемы с последовательным подключением обмоток. Наличие высоких пусковых токов создаёт повышенную электрическую мощность в момент запуска мотора. Данный способ подходит для двигателя постоянного тока, интенсивно работающего в кратковременном режиме, например для стартера. В таком режиме работы детали электродвигателя не успевают перегреться, поэтому износ их незначителен.
Ротор (якорь)
В рассмотренном выше примере примитивного электромотора ротор состоит из двухзубцового якоря на одной обмотке, с чётко выраженными полюсами. Конструкция обеспечивает вращение вала электромотора.
В описанном устройстве есть существенный недостаток: при остановке вращения якоря, его обмотки занимают устойчивое. Для повторного запуска электродвигателя требуется сообщить валу некий крутящий момент.
Этого серьёзного недостатка лишён якорь с тремя и большим количеством обмоток. На рисунке 3 показано изображение трёхобмоточного ротора, а на рис. 4 – якорь с большим количеством обмоток.
 Рисунок 3. Ротор с тремя обмотками
Рисунок 3. Ротор с тремя обмотками  Рисунок 4. Якорь со многими обмотками
Рисунок 4. Якорь со многими обмотками
Подобные роторы довольно часто встречаются в небольших маломощных электродвигателях.
Для построения мощных тяговых электродвигателей и с целью повышения стабильности частоты вращения используют якоря с большим количеством обмоток. Схема такого двигателя показана на рисунке 5.

Рисунок 5. Схема электромотора с многообмоточным якорем
Коллектор
Если на выводы обмоток ротора подключить источник постоянного тока, якорь сделает пол-оборота и остановится. Для продолжения процесса вращения необходимо поменять полярность подводимого тока. Устройство, выполняющее функции переключения тока с целью изменения полярности на выводах обмоток, называется коллектором.
Самый простой коллектор состоит из двух, изолированных полукруглых пластин. Каждая из них в определённый момент контактирует со щёткой, с которой снимается напряжение. Одна ламель всегда подсоединена к плюсу, а вторая – к минусу. При повороте вала на 180º пластины коллектора меняются местами, вследствие чего происходит новая коммутация со сменой полярности.
Такой же принцип коммутации питания обмоток используются во всех коллекторах, в т. ч. и в устройствах с большим количеством ламелей (по паре на каждую обмотку). Таким образом, коллектор обеспечивает коммутацию, необходимую для непрерывного вращения ротора.
В современных конструкциях коллектора ламели расположены по кругу таким образом, что каждая пластина соответствующей пары находится на диаметрально противоположной стороне. Цепь якоря коммутируется в результате изменения положения вала.
Принцип работы
Ещё со школьной скамьи мы помним, что на провод под напряжением, расположенный между полюсами магнита, действует выталкивающая сила. Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
F=B×I×L, где B означает величину магнитной индукции поля, I – сила тока, L – длина провода.
Вектор «Амперовой» всегда перпендикулярен до линий магнитных потоков между полюсами. Схематически принцип работы изображён на рис. 6.

Рис. 6. Принцип работы ДПТ
Если вместо прямого проводника возьмём контурную рамку и подсоединим её к источнику тока, то она повернётся на 180º и остановится в в таком положении, в котором результирующая сила окажется равной 0. Попробуем подтолкнуть рамку. Она возвращается в исходное положение.
Поменяем полярность тока и повторим попытку: рамка сделала ещё пол-оборота. Логично припустить, что необходимо менять направление тока каждый раз, когда соответствующие витки обмоток проходят точки смены полюсов магнитов. Именно для этой цели и создан коллектор.
Схематически можно представить себе каждую якорную обмотку в виде отдельной контурной рамки. Если обмоток несколько, то в каждый момент времени одна из них подходит к магниту статора и оказывается под действием выталкивающей силы. Таким образом, поддерживается непрерывное вращение якоря.
Типы ДПТ
Существующие электродвигатели постоянного тока можно классифицировать по двум основным признакам: по наличию или отсутствию в конструкции мотора щеточно-коллекторного узла и по типу магнитной системы статора.
Рассмотрим основные отличия.
По наличию щеточно-коллекторного узла
Двигатели постоянного тока для коммутации обмоток, которых используются щёточно-коллекторные узлы, называются коллекторными. Они охватывают большой спектр линейки моделей электромоторов. Существуют двигатели, в конструкции которых применяется до 8 щёточно-коллекторных узлов.
Функции ротора может выполнять постоянный магнит, а ток от электрической сети подаётся непосредственно на обмотки статора. В таком варианте отпадает надобность в коллекторе, а проблемы, связанные с коммутацией, решаются с помощью электроники.
В таких бесколлекторных двигателях устранён один из недостатков –искрение, приводящее к интенсивному износу пластин коллектора и щёток. Кроме того, они проще в обслуживании и сохраняют все полезные характеристики ДПТ: простота в управлении связанном с регулировкой оборотов, высокие показатели КПД и другие. Бесколлекторные моторы носят название вентильных электродвигателей.
По виду конструкции магнитной системы статора
В конструкциях синхронных двигателей существуют модели с постоянными магнитами и ДПТ с обмотками возбуждения. Электродвигатели серий, в которых применяются статоры с потоком возбуждения от обмоток, довольно распространены. Они обеспечивают стабильную скорость вращения валов, высокую номинальную механическую мощность.
О способах подключения статорных обмоток шла речь выше. Ещё раз подчеркнём, что от выбора схемы подключения зависят электрические и тяговые характеристики двигателей постоянного тока. Они разные в последовательных обмотках и в катушках с параллельным возбуждением.
Управление
Не трудно понять, что если изменить полярность напряжения, то направление вращения якоря также изменится. Это позволяет легко управлять электромотором, манипулируя полярностью щеток.
Механическая характеристика
Рассмотрим график зависимости частоты от момента силы на валу. Мы видим прямую с отрицательным наклоном. Эта прямая выражает механическую характеристику электродвигателя постоянного тока. Для её построения выбирают определённое фиксированное напряжение, подведённое для питания обмоток ротора.

Примеры механических характеристик ДПТ независимого возбуждения
Регулировочная характеристика
Такая же прямая, но идущая с положительным наклоном, является графиком зависимости частоты вращения якоря от напряжения питания. Это и есть регулировочная характеристика синхронного двигателя.
Построение указанного графика осуществляется при определённом моменте развиваемом ДПТ.

Пример регулировочных характеристик двигателя с якорным управлением
Благодаря линейности характеристик упрощается управление электродвигателями постоянного тока. Поскольку сила F пропорциональна току, то изменяя его величину, например переменным сопротивлением, можно регулировать параметры работы электродвигателя.
Регулирование частоты вращения ротора легко осуществляется путём изменения напряжения. В коллекторных двигателях с помощью пусковых реостатов добиваются плавности увеличения оборотов, что особенно важно для тяговых двигателей. Это также один из эффективных способов торможения. Мало того, в режиме торможения синхронный электродвигатель вырабатывает электрическую энергию, которую можно возвращать в энергосеть.
Области применения
Перечислять все области применения электродвигателей можно бесконечно долго. Для примера назовём лишь несколько из них:
- бытовые и промышленные электроинструменты;
- автомобилестроение – стеклоподъёмники, вентиляторы и другая автоматика;
- трамваи, троллейбусы, электрокары, подъёмные краны и другие механизмы, для которых важны высокие параметры тяговых характеристик.
Преимущества и недостатки
К достоинствам относится:
- Линейная зависимость характеристик электродвигателей постоянного тока (прямые линии) упрощающие управление;
- Легко регулируемая частота вращения;
- хорошие пусковые характеристики;
- компактные размеры.
У асинхронных электродвигателей, являющихся двигателями переменного тока очень трудно достичь таких характеристик.
Недостатки:
- ограниченный ресурс коллектора и щёток;
- дополнительная трата времени на профилактическое обслуживание, связанное с поддержанием коллекторно-щёточных узлов;
- ввиду того, что мы пользуемся сетями с переменным напряжением, возникает необходимость выпрямления тока;
- дороговизна в изготовлении якорей.
По перечисленным параметрам из недостатков в выигрыше оказываются модели асинхронных двигателей. Однако во многих случаях применение электродвигателя постоянного тока является единственно возможным вариантом, не требующим усложнения электрической схемы.
Двигатель постоянного тока независимого возбуждения (ДПТ НВ)
Двигатель постоянного тока независимого возбуждения (ДПТ НВ) В этом двигателе (рисунок 1) обмотка возбуждения подключена к отдельному источнику питания. В цепь обмотки возбуждения включен регулировочный реостат rрег, а в цепь якоря — добавочный (пусковой) реостат Rп. Характерная особенность ДПТ НВ — его ток возбуждения Iв не зависит от тока якоря Iя так как питание обмотки возбуждения независимое.
Схема двигателя постоянного тока независимого возбуждения (ДПТ НВ)
Механическая характеристика двигателя постоянного тока независимого возбуждения (ДПТ НВ)
Уравнение механической характеристики двигателя постоянного тока независимого возбуждения имеет вид
где: n0 — частота вращения вала двигателя при холостом ходе. Δn — изменение частоты вращения двигателя под действием механической нагрузки.
Из этого уравнения следует, что механические характеристики двигателя постоянного тока независимого возбуждения (ДПТ НВ) прямолинейны и пересекают ось ординат в точке холостого хода n0 (рис 13.13 а), при этом изменение частоты вращения двигателя Δn, обусловленное изменением его механической нагрузки, пропорционально сопротивлению цепи якоря Rа =∑R + Rдоб. Поэтому при наименьшем сопротивлении цепи якоря Rа = ∑R, когда Rдоб = 0, соответствует наименьший перепад частоты вращения Δn. При этом механическая характеристика становится жесткой (график 1).
Механические характеристики двигателя, полученные при номинальных значениях напряжения на обмотках якоря и возбуждения и при отсутствии добавочных сопротивлений в цепи якоря, называют естественными рисунок 13.13, а (график 1 Rдоб = 0 ).
Если же хотя бы один из перечисленных параметров двигателя изменен (напряжение на обмотках якоря или возбуждения отличаются от номинальных значений, или же изменено сопротивление в цепи якоря введением Rдоб), то механические характеристики называют искусственными .
Искусственные механические характеристики, полученные введением в цепь якоря добавочного сопротивления Rдоб, называют также реостатными (графики 2 и 3).
При оценке регулировочных свойств двигателей постоянного тока наибольшее значение имеют механические характеристики n = f(M). При неизменном моменте нагрузки на валу двигателя с увеличением сопротивления резистора Rдоб частота вращения уменьшается. Сопротивления резистора Rдоб для получения искусственной механической характеристики, соответствующей требуемой частоте вращения n при заданной нагрузке (обычно номинальной) для двигателей независимого возбуждения:
где U — напряжение питания цепи якоря двигателя, В; Iя — ток якоря, соответствующий заданной нагрузке двигателя, А; n — требуемая частота вращения, об/мин; n0 — частота вращения холостого хода, об/мин.
Частота вращения холостого хода n0 представляет собой пограничную частоту вращения, при превышении которой двигатель переходит в генераторный режим. Эта частота вращения превышает номинальную nном на столько, на сколько номинальное напряжение Uном подводимое к цепи якоря, превышает ЭДС якоря Ея ном при номинальной нагрузки двигателя.
На форму механических характеристик двигателя влияет величина основного магнитного потока возбуждения Ф. При уменьшении Ф (при возрастании сопротивления резистора rpeг) увеличивается частота вращения холостого хода двигателя n0 и перепад частоты вращения Δn. Это приводит к значительному изменению жесткости механической характеристики двигателя (рис. 13.13, б). Если же изменять напряжение на обмотке якоря U (при неизменных Rдоб и Rрег), то меняется n0, a Δn остается неизменным [см. (13.10)]. В итоге механические характеристики смещаются вдоль оси ординат, оставаясь параллельными друг другу (рис. 13.13, в). Это создает наиболее благоприятные условия при регулировании частоты вращения двигателей путем изменения напряжения U, подводимого к цепи якоря. Такой метод регулирования частоты вращения получил наибольшее распространение еще и благодаря разработке и широкому применению регулируемых тиристорных преобразователей напряжения.
Используемая литература: — Кацман М.М. Справочник по электрическим машинам
Регулировочная характеристика двигателя постоянного тока график



Практическое применение ДПТ нашёл Б. С. Якоби, установив его на лодке для вращения лопастей. Источником тока учёному послужили 320 гальванических элементов. Несмотря на громоздкость оборудования, лодка могла плыть против течения, транспортируя 12 пассажиров на борту.
Лишь в конце XIX столетия синхронными электродвигателями начали оснащать промышленные машины. Этому способствовало осознание принципа преобразования электродвигателем постоянного тока механической энергии в электричество. То есть, используя электродвигатель в режиме генератора, удалось получать электроэнергию, производство которой оказалось существенно дешевле от затрат на выпуск гальванических элементов. С тех пор электродвигатели совершенствовались и стали завоёвывать прочные позиции во всех сферах нашей жизнедеятельности.
Устройство и описание ДПТ
Конструктивно электродвигатель постоянного тока устроен по принципу взаимодействия магнитных полей.
Самый простой ДПТ состоит из следующих основных узлов:
- Двух обмоток с сердечниками, соединенных последовательно. Данная конструкция расположена на валу и образует узел, называемый ротором или якорем.
- Двух постоянных магнитов, повёрнутых разными полюсами к обмоткам. Они выполняют задачу неподвижного статора.
- Коллектора – двух полукруглых, изолированных пластин, расположенных на валу ДПТ.
- Двух неподвижных контактных элементов (щёток), предназначенных для передачи электротока через коллектор до обмоток возбуждения.

Рисунок 1. Схематическое изображение простейшего электродвигателя постоянного тока.
Рассмотренный выше пример – это скорее рабочая модель коллекторного электродвигателя. На практике такие устройства не применяются. Дело в том, что у такого моторчика слишком маленькая мощность. Он работает рывками, особенно при подключении механической нагрузки.
Статор (индуктор)
В моделях мощных современных двигателях постоянного тока используются статоры, они же индукторы, в виде катушек, намотанных на сердечники. При замыкании электрической цепи происходит образование линий магнитного поля, под действием возникающей электромагнитной индукции.
Для запитывания обмоток индуктора ДПТ могут использоваться различные схемы подключения:
- с независимым возбуждением обмоток;
- соединение параллельно обмоткам якоря;
- варианты с последовательным возбуждением катушек ротора и статора;
- смешанное подсоединение.
Схемы подключения наглядно видно на рисунке 2.

Рисунок 2. Схемы подключения обмоток статора ДПТ
У каждого способа есть свои преимущества и недостатки. Часто способ подключения диктуется условиями, в которых предстоит эксплуатация электродвигателя постоянного тока. В частности, если требуется уменьшить искрения коллектора, то применяют параллельное соединение. Для увеличения крутящего момента лучше использовать схемы с последовательным подключением обмоток. Наличие высоких пусковых токов создаёт повышенную электрическую мощность в момент запуска мотора. Данный способ подходит для двигателя постоянного тока, интенсивно работающего в кратковременном режиме, например для стартера. В таком режиме работы детали электродвигателя не успевают перегреться, поэтому износ их незначителен.
Ротор (якорь)
В рассмотренном выше примере примитивного электромотора ротор состоит из двухзубцового якоря на одной обмотке, с чётко выраженными полюсами. Конструкция обеспечивает вращение вала электромотора.
В описанном устройстве есть существенный недостаток: при остановке вращения якоря, его обмотки занимают устойчивое. Для повторного запуска электродвигателя требуется сообщить валу некий крутящий момент.
Этого серьёзного недостатка лишён якорь с тремя и большим количеством обмоток. На рисунке 3 показано изображение трёхобмоточного ротора, а на рис. 4 – якорь с большим количеством обмоток.

Рисунок 3. Ротор с тремя обмотками

Рисунок 4. Якорь со многими обмотками
Подобные роторы довольно часто встречаются в небольших маломощных электродвигателях.
Для построения мощных тяговых электродвигателей и с целью повышения стабильности частоты вращения используют якоря с большим количеством обмоток. Схема такого двигателя показана на рисунке 5.

Рисунок 5. Схема электромотора с многообмоточным якорем
Коллектор
Если на выводы обмоток ротора подключить источник постоянного тока, якорь сделает пол-оборота и остановится. Для продолжения процесса вращения необходимо поменять полярность подводимого тока. Устройство, выполняющее функции переключения тока с целью изменения полярности на выводах обмоток, называется коллектором.
Самый простой коллектор состоит из двух, изолированных полукруглых пластин. Каждая из них в определённый момент контактирует со щёткой, с которой снимается напряжение. Одна ламель всегда подсоединена к плюсу, а вторая – к минусу. При повороте вала на 180º пластины коллектора меняются местами, вследствие чего происходит новая коммутация со сменой полярности.
Такой же принцип коммутации питания обмоток используются во всех коллекторах, в т. ч. и в устройствах с большим количеством ламелей (по паре на каждую обмотку). Таким образом, коллектор обеспечивает коммутацию, необходимую для непрерывного вращения ротора.
В современных конструкциях коллектора ламели расположены по кругу таким образом, что каждая пластина соответствующей пары находится на диаметрально противоположной стороне. Цепь якоря коммутируется в результате изменения положения вала.









Немного истории и теории

Первые электрические двигатели
Бурное развитие электротехники не прекращается с момента зарождения этого направления в физике. Первыми разработками, связанными с электрическими моторами, были работы многих ученых в 20-х годах 19-го столетия. Изобретали всяких мастей пытались соорудить механические машины, способные превращать электрическую энергию в кинетическую.
- Особую значимость имеют исследования М. Фарадея, который в 1821 году, проводя эксперименты по взаимодействию тока и разных проводников, выяснил, что проводник может вращаться внутри магнитного поля, ровно как вокруг проводника может вращаться и магнит.
- Второй этап развития занял более значительный отрезок времени от 1830-х до 1860-х годов. Теперь, кода основные принципы преобразования энергии человеку были известны, он пытался создать наиболее эффективную конструкцию двигателя с вращающимся якорем.
- В 1833 году американский изобретатель и по совместительству кузнец Томас Девенпорт смог построить первый роторный двигатель, работающий на постоянном токе, и сконструировать модель поезда, приводимую им в движение. На свою электрическую машину он получил патент спустя 4 года.

Б.С. Якоби
- В 1834 году Борис Семенович Якоби, русско-немецкий физик и изобретатель, создает первый в мире электродвигатель постоянного тока, в котором смог таки реализовать основной принцип работы таких машин, применяемый и сегодня – с постоянно вращающейся частью.
- В 1838 году, 13 сентября был произведен пуск настоящей лодки по Неве с 12-ю пассажирами на борту – так происходили полевые испытания двигателя Якоби. Лодка двигалась со скоростью 3 км\ч против течения. Привод двигателя был соединен с лопастными колесами по бокам, как на пароходах того времени. Электрический ток подавался к агрегату от батареи содержащей 320 гальванических элементов.

Лодка с лопастными колесами
Результатом проведенных испытаний стала возможность формирования основных принципов дальнейшего развития электромоторов:
- Во-первых, стало ясно, что расширение сферы их применения напрямую зависит от удешевления способов получения электрической энергии – требовался надежный и недорогой генератор, а не дорогостоящие на тот момент гальванические батареи.
- Во-вторых, требовалось создать достаточно компактные двигатели, которые бы, однако, обладали большим коэффициентом полезного действия.
- И в третьих – были очевидны преимущества двигателей с вращающимися неоднополюсными якорями, с постоянным вращающимся моментом.

Работа шунтового генератора
Затем наступает третий этап развития электромоторов, который ознаменован открытием явления самовозбуждения двигателя электрического тока, после чего был сформирован принцип обратимости таких машин, то есть двигатель может быть генератором, и наоборот. Теперь для того чтобы запитать двигатель начали применять недорогие генераторы тока, что в принципе делается и сегодня.
Интересно знать! Любая электрическая сеть подключена к электростанции, вырабатывающей ток. Сама станция, по сути, и есть набор мощнейших генераторов, приводимых в движение разными способами: течение реки, энергия ветра, ядерные реакции и прочее. Исключение составляют, разве что, фотоэлементы в солнечных батареях, но это уже другая, дорогая, пока не нашедшая достаточного распространения история.
Вид современной конструкции электродвигатель приобрел в далеком 1886 году, после чего в него вносились только доработки и усовершенствования.
Основные принципы функционирования

Двигатели постоянного тока и принцип действия: вспоминаем школьные уроки физики
В основу любого электрического двигателя положен принцип магнитного притягивания и отталкивания. В качестве эксперимента можете провести такой простейший опыт.
- Внутрь магнитного поля нужно поместить проводник, по которому нужно пропустить электрический ток.
- Для этого удобнее всего пользоваться магнитом в форме подковы, а в качестве проводника подойдет медная проволока подключенная концами к батарейке.
- В результате опыта вы увидите, что проволоку вытолкнет из области действия постоянного магнита. Почему это происходит?
- Дело в том, что при прохождении тока через проводник, вокруг последнего создается электромагнитное поле, которое вступает во взаимодействие с уже имеющимся, от постоянного магнита. Как результат этого взаимодействия, мы видим механическое движение проводника.
- Если говорить более подробно, то выглядит это так. Когда круговое поле проводника вступает во взаимодействие с постоянным от магнита, то сила магнитного поля с одной стороны возрастает, а с другой уменьшается, из-за чего провод выталкивает из области действия магнита под углом 90 градусов.

Занимательная физика
- Направление, в котором вытолкнет проводник можно установить по правилу левой руки, которое применимо только к электродвигателям. Правило гласит следующее – левую руку нужно поместить в магнитное поле так, чтобы его силовые линии входили в нее с ладони, а 4 пальца были направлены по ходу движения положительных зарядов, тогда отведенный в сторону большой палец покажет направление воздействующей на проводник движущей силы.
Эти простые принципы двигателя постоянного тока применяется и поныне. Однако в современных агрегатах вместо постоянных магнитов применяют электрические, а рамки заменяют сложные системы обмоток.
Принцип работы
Ещё со школьной скамьи мы помним, что на провод под напряжением, расположенный между полюсами магнита, действует выталкивающая сила. Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
F=B×I×L, где B означает величину магнитной индукции поля, I – сила тока, L – длина провода.
Вектор «Амперовой» всегда перпендикулярен до линий магнитных потоков между полюсами. Схематически принцип работы изображён на рис. 6.

Рис. 6. Принцип работы ДПТ
Если вместо прямого проводника возьмём контурную рамку и подсоединим её к источнику тока, то она повернётся на 180º и остановится в в таком положении, в котором результирующая сила окажется равной 0. Попробуем подтолкнуть рамку. Она возвращается в исходное положение.
Поменяем полярность тока и повторим попытку: рамка сделала ещё пол-оборота. Логично припустить, что необходимо менять направление тока каждый раз, когда соответствующие витки обмоток проходят точки смены полюсов магнитов. Именно для этой цели и создан коллектор.
Схематически можно представить себе каждую якорную обмотку в виде отдельной контурной рамки. Если обмоток несколько, то в каждый момент времени одна из них подходит к магниту статора и оказывается под действием выталкивающей силы. Таким образом, поддерживается непрерывное вращение якоря.
Типы ДПТ
Существующие электродвигатели постоянного тока можно классифицировать по двум основным признакам: по наличию или отсутствию в конструкции мотора щеточно-коллекторного узла и по типу магнитной системы статора.
Рассмотрим основные отличия.
По наличию щеточно-коллекторного узла
Двигатели постоянного тока для коммутации обмоток, которых используются щёточно-коллекторные узлы, называются коллекторными. Они охватывают большой спектр линейки моделей электромоторов. Существуют двигатели, в конструкции которых применяется до 8 щёточно-коллекторных узлов.
Функции ротора может выполнять постоянный магнит, а ток от электрической сети подаётся непосредственно на обмотки статора. В таком варианте отпадает надобность в коллекторе, а проблемы, связанные с коммутацией, решаются с помощью электроники.
В таких бесколлекторных двигателях устранён один из недостатков –искрение, приводящее к интенсивному износу пластин коллектора и щёток. Кроме того, они проще в обслуживании и сохраняют все полезные характеристики ДПТ: простота в управлении связанном с регулировкой оборотов, высокие показатели КПД и другие. Бесколлекторные моторы носят название вентильных электродвигателей.
По виду конструкции магнитной системы статора
В конструкциях синхронных двигателей существуют модели с постоянными магнитами и ДПТ с обмотками возбуждения. Электродвигатели серий, в которых применяются статоры с потоком возбуждения от обмоток, довольно распространены. Они обеспечивают стабильную скорость вращения валов, высокую номинальную механическую мощность.
О способах подключения статорных обмоток шла речь выше. Ещё раз подчеркнём, что от выбора схемы подключения зависят электрические и тяговые характеристики двигателей постоянного тока. Они разные в последовательных обмотках и в катушках с параллельным возбуждением.
Сферы применения электродвигателей постоянного тока
Электродвигатели постоянного тока — наиболее часто используемые приводы для создания непрерывного движения с регулируемой скоростью вращения. Они могут приводить в движение транспортные средства: от игрушечных автомобилей-аттракционов с аккумулятором 12 В до электричек и троллейбусов, где точность регулировки оборотов наглядно демонстрируется плавным разгоном техники. Агрегаты на постоянных магнитах имеют особенно большую плотность мощности, поэтому часто используются в оборонительной отрасли.
Электрический транспорт — одна из самых распространённых сфер применения ДПТ. На них основана работа:
- метро,
- трамваев,
- троллейбусов,
- электровозов,
- пригородных электрических дорог.
Другую сферу применения ДПТ составляют подъёмные механизмы, включая электрические подъёмные краны. Ввиду отсутствия жёстких ограничений по размерам электродвигатели часто остаются незамеченными. Их используют в автомобилестроении: на грузовом транспорте устанавливаются агрегаты с рабочим напряжением от 24 В, а на легковом — 12 В. Здесь ДПТ работают от генератора или АКБ и отвечают за разные функции:
- поднятие-опускание стёкол;
- поддержание в салоне заданной температуры;
- позиционирование сидений;
- управление зеркалами и пр.

Использование электродвигателя на постоянном токе для автоматизированной очистки стёкол
Для применения ДПТ в качестве генератора тока необходимо поменять полярность питания постоянного тока, подаваемого на соединения агрегата. Т. е., нужно изменить направление тока в якоре или обмотке возбуждения. В результате вал будет вращаться в противоположном направлении. Самым простым и недорогим способом управления вращением вала остаются переключатели.
При использовании ДПТ учитывается одна из важнейших характеристик — способ подключения обмотки возбуждения:
- независимый,
- параллельный,
- последовательный,
- смешанный.
В ДПТ с последовательной схемой возбуждения при необходимости можно уменьшить скорость вращения в 2 раза. За это отвечает переменный резистор, который при необходимости включают в цепь возбуждающей обмотки реостата. В двигателях с параллельной схемой для уменьшения оборотов в 2 раз тоже применяют реостат, а для повышения в 4 раза подключают сопротивление.

В двигателях с параллельной схемой для уменьшения оборотов в 2 раз тоже применяют реостат, а для повышения в 4 раза подключают сопротивление
Управление
Не трудно понять, что если изменить полярность напряжения, то направление вращения якоря также изменится. Это позволяет легко управлять электромотором, манипулируя полярностью щеток.
Механическая характеристика
Рассмотрим график зависимости частоты от момента силы на валу. Мы видим прямую с отрицательным наклоном. Эта прямая выражает механическую характеристику электродвигателя постоянного тока. Для её построения выбирают определённое фиксированное напряжение, подведённое для питания обмоток ротора.

Примеры механических характеристик ДПТ независимого возбуждения
Регулировочная характеристика
Такая же прямая, но идущая с положительным наклоном, является графиком зависимости частоты вращения якоря от напряжения питания. Это и есть регулировочная характеристика синхронного двигателя.
Построение указанного графика осуществляется при определённом моменте развиваемом ДПТ.

Пример регулировочных характеристик двигателя с якорным управлением
Благодаря линейности характеристик упрощается управление электродвигателями постоянного тока. Поскольку сила F пропорциональна току, то изменяя его величину, например переменным сопротивлением, можно регулировать параметры работы электродвигателя.
Регулирование частоты вращения ротора легко осуществляется путём изменения напряжения. В коллекторных двигателях с помощью пусковых реостатов добиваются плавности увеличения оборотов, что особенно важно для тяговых двигателей. Это также один из эффективных способов торможения. Мало того, в режиме торможения синхронный электродвигатель вырабатывает электрическую энергию, которую можно возвращать в энергосеть.
§5.6. Двигатели постоянного тока. Основные характеристики
Двигатели независимого и параллельного возбуждения. Схема включения двигателя независимого возбуждения показана на рис. 5.19.
Рис. 5.19.
В цепь якоря может быть включено добавочное сопротивление Rд, например пусковой реостат. Для регулирования тока возбуждения в цепь обмотки возбуждения может быть включен регулировочный реостат Rр. У двигателя параллельного возбуждения обмотки якоря и возбуждения подключены к одному источнику питания, и напряжение на них одинаковое. Следовательно, двигатель параллельного возбуждения можно рассматривать как двигатель независимого возбуждения при Uя= Uв.
Механические характеристики. Механические характеристики двигателей принято подразделять на естественные и искусственные. Естественная характеристика соответствует номинальному напряжению питания и отсутствию добавочных сопротивлений в цепях обмоток двигателя. Если хотя бы одно из перечисленных условий не выполняется, характеристика называется искусственной. Уравнения электромеханической ω=f(I я) и механической ω=f(M эм.) характеристик могут быть найдены из уравнения равновесия ЭДС и напряжений для якорной цепи двигателя, записанного на основании второго закона Кирхгофа:
где R я – активное сопротивление якоря. Преобразуя (5.35) с учетом (5.6), получим уравнение электромеханической характеристики
В соответствии с (5.10) ток якоря I я=M эм./kФ и выражение (5.36) преобразуется в уравнение механической характеристики:
Это уравнение можно представить в виде ω= ω о.ид.— Δ ω, где
ω о.ид — угловая скорость идеального холостого хода ( при Iя=0 и, соответственно, Мэм.=0 ); Δ ω= Мэм. [(Rя+Rд)/(kФ) 2 ]– уменьшение угловой скорости, обусловленное нагрузкой на валу двигателя и пропорциональное сопротивлению якорной цепи. Семейство механических характеристик при номинальном напряжении на якоре и потоке возбуждения и различных добавочных сопротивлениях в цепи якоря изображено на рис. 5.20,а.
Механические характеристики двигателей принято оценивать по трем показателям: устойчивости, жесткости и линейности. Естественная механическая характеристика, соответствующая (5.37) при Rд=0, изображена прямой линией 1. Механическая характеристика линейная; отклонение от линейного закона может быть вызвано реакцией якоря, приводящей к изменению потока Ф. Эта характеристика жесткая, так как при изменении момента нагрузки и соответственно скорости поток возбуждения не изменяется. Жесткость характеристики уменьшается при введении добавочного сопротивления в цепь якоря (прямые линии 2 и 3 – искусственные реостатные характеристики). Характеристики устойчивые, так как dω/dMэм. Мст. Если это условие выполняется, то при включении двигателя в сеть ротор приходит в движение и разгоняется до установившегося режима. Ввиду того, что ротор обладает моментом инерции, разгоняется он не мгновенно – нарастание скорости происходит по закону, близкому к экспоненте. Пуск двигателя постоянного тока осложняется тем, что при ω=0 ЭДС Eя=0 и пусковой ток якоря Iяп= Uя/ Rя может в 10 – 20 раз превышать номинальный ток, что опасно как для двигателя (усиление искрения, динамические перегрузки), так и для источника питания. Поэтому важнейшими показателями пускового режима являются кратность пускового тока Kiп= Iп/ Iном и кратность пускового момента Кмп= Мп/ Мном. При пуске необходимо обеспечить требуемую кратность пускового момента при возможно меньшей кратности пускового тока. Прямой пуск применяют обычно при кратности пускового тока K iп?6. При большем значении Kiп применяют способы пуска, обеспечивающие снижение тока Iяп либо за счет подачи пониженного напряжения на обмотку якоря, либо за счет введения добавочного сопротивления в цепь якоря. Первый способ применяется в основном при работе двигателей в системах автоматического регулирования с якорным способом управления. Второй способ, называемый реостатным, распространен наиболее широко в нерегулируемом приводе. Сопротивление пускового реостата Rп= Rд (см. рис. 5.19) выбирают таким, чтобы ограничить Iяп до (1,4 – 1,8) Iя.ном у двигателей средней мощности и до (2,0 – 2,5) Iя.ном у двигателей малой мощности. По мере разгона якоря ток якоря уменьшается и пусковой реостат постепенно выводится.
Преимущества и недостатки
К достоинствам относится:
- Линейная зависимость характеристик электродвигателей постоянного тока (прямые линии) упрощающие управление;
- Легко регулируемая частота вращения;
- хорошие пусковые характеристики;
- компактные размеры.
У асинхронных электродвигателей, являющихся двигателями переменного тока очень трудно достичь таких характеристик.
Недостатки:
- ограниченный ресурс коллектора и щёток;
- дополнительная трата времени на профилактическое обслуживание, связанное с поддержанием коллекторно-щёточных узлов;
- ввиду того, что мы пользуемся сетями с переменным напряжением, возникает необходимость выпрямления тока;
- дороговизна в изготовлении якорей.
По перечисленным параметрам из недостатков в выигрыше оказываются модели асинхронных двигателей. Однако во многих случаях применение электродвигателя постоянного тока является единственно возможным вариантом, не требующим усложнения электрической схемы.