Электродвигатели постоянного и переменного тока: особенности и отличия

Электрический двигатель представляет собой аппарат, в котором энергия электрического тока преобразуется в механическое движение его выходного вала за счет физического явления индукции. Существует огромное разнообразие моделей этих устройств, различающихся размерами, конструктивными особенностями, областями применения, но неизменными остаются две основные части: неподвижный статор и вращающийся внутри него ротор. Он приводится в движение магнитным полем, возникающем при пропускании тока через обмотки агрегата. При нарушении их изоляции или возникновении межвиткового замыкания работоспособность прибора нарушается, стоимость перемотки электродвигателя зависит от степени изношенности его основных частей.
Существует два основных класса этих устройств, разделяемых по типу питания переменным или постоянным током. Первый вид получил наиболее широкое распространение, второй используется ограниченно вследствие более высокой стоимости.
Основные конструктивные отличия
- В двигателях переменного тока-на статоре.
- Постоянного-на роторе, который также называется якорем.
Моторы первого типа бывают по способу подключения одно и трехфазными. Наибольшее распространение получили асинхронные двигатели, в которых движение ротора осуществляется с меньшей скоростью, чем вращение переменного магнитного поля, создаваемого обмотками на статоре. Они отличаются надежностью, простотой конструкции и долгим сроком службы. При возникновении неисправностей ремонт асинхронного двигателя полностью восстанавливает его работоспособность.
В двигателях постоянного тока движение якоря осуществляется синхронно с магнитным полем. Их преимуществом является возможность регулирования скорости вращения выходного вала в зависимости от приложенного к обмоткам напряжения. Поэтому эти агрегаты используют в прокатных станах, металлорежущих станках и при создании тягового усилия на транспорте. Шаговые электродвигатели с возможностью регулировки многих параметров применяются в наукоемких отраслях производства.
44.Асинхронные электрические машины. Принцип действия асинхронного двигателя.
Асинхронная машина — это электрическая машина переменного тока, частота вращения ротора которой не равна (в двигательном режиме меньше) частоте вращения магнитного поля, создаваемого током обмотки статора.
В ряде стран к асинхронным машинам причисляют также коллекторные машины. Второе название асинхронных машин — индукционные вследствие того, что ток в обмотке ротора индуцируется вращающимся полем статора. Асинхронные машины сегодня составляют большую часть электрических машин. В основном они применяются в качестве электродвигателей и являются основными преобразователями электрической энергии в механическую.
Достоинства:Лёгкость в изготовлении.Отсутствие механического контакта со статической частью машины.
Недостатки:Небольшой пусковой момент.Значительный пусковой ток.
Асинхронная машина имеет статор и ротор, разделённые воздушным зазором. Её активными частями являются обмотки и магнитопровод (сердечник); все остальные части — конструктивные, обеспечивающие необходимую прочность, жёсткость, охлаждение, возможность вращения и т. п.
Обмотка статора представляет собой трёхфазную (в общем случае — многофазную) обмотку, проводники которой равномерно распределены по окружности статора и пофазно уложены в пазах с угловым расстоянием 120 эл.град. Фазы обмотки статора соединяют по стандартным схемам «треугольник» или «звезда» и подключают к сети трёхфазного тока. Магнитопровод статора перемагничивается в процессе изменения тока в обмотке статора, поэтому его набирают из пластин электротехнической стали для обеспечения минимальных магнитных потерь. Основным методом сборки магнитопровода в пакет является шихтовка.
По конструкции ротора асинхронные машины подразделяют на два основных типа: с короткозамкнутым ротором и с фазным ротором. Оба типа имеют одинаковую конструкцию статора и отличаются лишь исполнением обмотки ротора. Магнитопровод ротора выполняется аналогично магнитопроводу статора — из пластин электротехнической стали.
На обмотку статора подается напряжение, под действием которого по этим обмоткам протекает ток и создает вращающееся магнитное поле. Магнитное поле воздействует на обмотку ротора и по закону электромагнитной индукции наводит в них ЭДС. В обмотке ротора под действием наводимой ЭДС возникает ток. Ток в обмотке ротора создаёт собственное магнитное поле, которое вступает во взаимодействие с вращающимся магнитным полем статора. В результате на каждый зубец магнитопровода ротора действует сила, которая, складываясь по окружности, создает вращающий электромагнитный момент, заставляющий ротор вращаться.
Наибольшее распространение среди электрических двигателей Получил трехфазный асинхронный двигатель, впервые сконструированный известным русским электриком М. О. Доливо-Добровольским.
Асинхронный двигатель отличается простотой конструкции Щ несложностью обслуживания. Как и любая машина переменного тока асинхронный двигатель состоит из двух основных частей; статора и ротора. Статором называется неподвижная часть машины, ротором — ее вращающаяся часть. Асинхронная машина обладает свойством обратимости, т. е. может быть использована как в режиме генератора, так и в режиме двигателя. Из-за ряда существенных недостатков асинхронные генераторы практически почти не применяются, тогда как асинхронные двигатели, как это было отмечено выше, получили очень широкое распространение.
Поэтому мы будем рассматривать работу асинхронной машины в режиме двигателя, т. е. процесс преобразования электрической энергии в энергию механическую.
Многофазная обмотка переменного тока создает вращающееся магнитное поле, скорость вращения которого в минуту 
Если ротор вращается со скоростью п2, равной скорости вращения магнитного поля (n2=n1), то такая скорость называется синхронной.
Если ротор вращается со скоростью, не равной скорости вращения магнитного поля < n2n1), то такая скорость называется асинхронной.
В асинхронном двигателе рабочий процесс может протекать только при асинхронной скорости, т. е. при скорости вращения ротора, не равной скорости вращения магнитного поля.
Скорость ротора может очень мало отличаться от скорости юля, но при работе двигателя она будет всегда меньше (n2<n1).
Работа асинхронного двигателя основана на явлении, названии диск Араго-Ленца (рис. 108). Это явление заключается в следующем: если перед полюсами постоянного магнита поместить медный диск 1, свободно сидящий на оси 2, и начать вращать магнит круг его оси при помощи рукоятки, то медный диск будет вращаться в том же направлении. Это объясняется тем, что при вращении магнита магнитные линии его поля, замыкаясь от северного полюса с южному, пронизывают диск и индуктируют в нем вихревые токи, 3 результате взаимодействия вихревых токов с магнитным полем магнита возникает сила, приводящая диск во вращение. На основании закона Ленца направление всякого индуктированного тока таково, что он противодействует причине, его вызвавшей. Поэтому вихревые токи в теле диска стремятся задержать вращение магнита, но, не имея возможности сделать это, приводят диск во вращение так, что он следует за магнитом. При этом скорость вращения диска всегда меньше, чем скорость вращения магнита. Если бы эти скорости почему-либо стали одинаковыми, то магнитные лиши не пересекали бы диска и, следовательно, в нем не возникали 5ы вихревые токи, т. е. не было бы силы, под действием которой диск вращается.
В асинхронных двигателях постоянный магнит заменен вращаюйся магнитным полем, создаваемым трехфазной обмоткой статора при включении ее в сеть переменного тока.
Вращающееся магнитное поле статора пересекает проводники обмотки ротора и индуктирует в них э.д. с. Если обмотка ротора замкнута на какое-либо сопротивление или накоротко, то по ней
под действием индуктируемой э. д. с. протекает ток. В результате полем обмотки статора создается вращающий момент, под действием которого ротор начинает вращаться.
Например, выделим часть окружности ротора, на которой находится один проводник его обмотки. Поле статора представим северным полюсом N, который вращается в пространстве и вокруг ротора по часовой стрелке с числом оборотов N в минуту. Следовательно, полюс N перемещается относительно проводника обмотки ротора слева направо, в результате чего в этом проводнике индуктируется э.д. с, которая согласно правилу правой руки направлена на зрителя (знак «точка»). Если обмотка ротора замкнута, то под действием э. д. с. по этой обмотке течет ток, направленный в выбранном нами проводнике также на зрителя.
В результате взаимодействия тока в проводнике обмотки ротора с магнитным полем возникает сила F, которая перемещает проводник в направлении, определяемом по правилу левой руки, т. е. слева направо. Вместе с проводником начинает перемещаться и ротор.
Если силу F, действующую на проводник обмотки ротора, умножить на расстояние этого проводника от оси ротора (плечо приложения силы), то получим вращающий момент, развиваемый током данного проводника. Так как на роторе помещено большое количество проводников, то сумма произведений сил, действующих на каждый из проводников, на расстояния этих проводников от оси ротора определяет вращающий момент, развиваемый двигателем. Под действием вращающего момента ротор приходит во вращение по направлению вращения магнитного поля. Следовательно, для реверсирования двигателя, т. е. для изменения направления вращения ротора, необходимо изменить направление вращения магнитного поля, созданного обмоткой статора. Это достигается изменением чередования фаз обмоток статора; для чего следует поменять местами по отношению к зажимам сети любые два из трех проводов, соединяющих обмотку статора с сетью. Реверсивные двигатели снабжаются переключателями, при помощи которых можно изменять чередование фаз обмоток статора, а следовательно, и направление вращения ротора.
Вне зависимости от направления вращения ротора его скорость n2, как уже указывалось, всегда меньше скорости магнитного поля статора.
Если предположить, что в какой-то момент времени число оборотов ротора оказалось равным числу оборотов поля статора, то проводники обмотки ротора не будут пересекаться магнитными линиями поля статора и тока в роторе не будет. В этом случае вращающий момент станет равным нулю, скорость вращения ротора уменьшится по сравнению со скоростью вращения поля статора, пока не воз никнет вращающий момент, уравновешивающий тормозной момент который складывается из момент; нагрузки на валу и момента сил трения в машине.
Тестовые вопросы по теме «Асинхронный электродвигатель»
Ответ: электрическая машина — электромеханический преобразователь физической энергии, основанный на явлениях электромагнитной индукции и силы Ампера, действующей на проводник с током, движущийся в магнитном поле.
2. Дайте определение электродвигателя.
Ответ: электрический двигатель – специальная машина (ее еще называют электромеханическим преобразователем), с помощью которой электроэнергия преобразовывается в механическое движение.
3. Дайте определение генератора.
Ответ: Генератор — устройство, в котором неэлектрические виды энергии (механическая, химическая, тепловая) преобразуются в электрическую энергию.
4. Какие законы лежит в основе работы электрических машин?
Ответ: Принцип действия электрических машин основан на законах электрических и магнитных явлений: законе электромагнитной индукции и законе Ампера.
Сущность закона электромагнитной индукции применительно к электрической машине состоит в том, что при движении проводника в магнитном поле со скоростью v в направлении, перпендикулярном вектору магнитной индукции В, в нем индуцируется ЭДС
где l — активная длина проводника, т.е. часть его общей длины, находящаяся в магнитном поле.
Если же проводник замкнуть, то в этом проводнике появится электрический ток I. В результате взаимодействия этого тока с внешним магнитным полем на проводник начнет действовать электромагнитная сила, которая определяется по закону Ампера
5. При каком условии обмотки статора соединяются «треугольником»
Ответ: Обмотки статора соединяются по схеме «треугольник», если асинхронный двигатель рассчитан на максимальное напряжение равное 220 В.
6. Какие двигатели получили наибольшее распространение?
Ответ: Наибольшее распространение получили бесколлекторные двигатели. Они применяются там, где требуется приблизительно постоянная скорость вращения и не требуется ее регулировка. Бесколлекторные двигатели просты по устройству, безотказны в работе и имеют высокий КПД.
7. Может ли ротор АД вращаться синхронно с вращающимся магнитным полем статора?
Ответ: Нет, потому что частота вращения ротора всегда немного меньше частоты вращения магнитного поля, т.к. при равенстве скоростей поле перестанет наводить в роторе ток, и на ротор перестанет действовать сила Ампера.
8. У какого двигателя обмотка ротора соединяется «звездой» при изготовлении?
Ответ: Асинхронный электродвигатель трехфазного тока при напряжении 380 В
9. При каком условии обмотки статора соединяются «звездой»?
Ответ: Обмотки статора соединяются звездой, если в паспорте двигателя указаны напряжения 220/380 В.
10. Методы выработка электроэнергии.
Ответ: Результирующий вращающийся МП статора пересекает его обмотки и обмотки ротора, наводя в них ЭДС, в рез-те в них протекают токи I1 I2, создающие две магнитдвижущие силы с результирующим МП, под действием которого ротор вращается со скоростью n2<n1 в ту же сторону, что и МП статора.
11. Кто впервые сконструировал трёхфазный асинхронный электродвигатель?
Ответ: Михаил Осипович Доливо-Добровольский в 1889 году.
12. Основные элементы асинхронного электродвигателя.
Ответ: Основные элементы двигателя — статор и ротор, отделенные друг от друга воздушным зазором. Статор – полый цилиндра, набранный из тонких листком электротехнической стали. Ротор – вращающаяся часть, набранная из стальных штампованных дисков.
13. Из какого материала выполняют статор асинхронного электродвигателя?
Ответ: чугун или алюминий
14. Условие, необходимое для работы асинхронного электродвигателя.
Ответ: частота магнитного потока статора (n2) должна быть меньше либо равна частоте магнитного потока ротора (n1); n2<_n1
15. Асинхронный электродвигатель-это двигатель работающий на…
Асинхронный двигатель – это двигатель, работающий на переменном токе и служащий для перевода электрической энергии в механическую при помощи вращающегося магнитного поля.
16. Скольжение ротора – это…
Скольжение ротора – это разность скоростей вращения ротора и изменения переменного магнитного потока, который создают обмотки статора. 𝑆=𝑛1−𝑛𝑛
где n – скорость вращения ротора асинхронного двигателя,
𝑛1 – скорость циклического изменения магнитного потока 𝑛1=60∙𝑓𝑝
где f – частота сети переменного тока,
p – число пар полюсов обмотки статора
17. Чему равно скольжение ротора в момент пуска.
Скольжение асинхронного двигателя — относительная разность скоростей вращения ротора и изменения переменного магнитного потока, создаваемого обмотками статора двигателя переменного тока. Скольжение может измеряться в относительных единицах и в процентах.
n – скорость вращения ротора
n1 — скорость циклического изменения магнитного потока статора, называется синхронной скоростью двигателя.
Т.к во время пуска вращение ротора n=0, то s=(n1-0)/n1=n1/n1=1
18. От чего зависит вращающий момент асинхронного электродвигателя.
Вращающий момент асинхронного двигателя создается при взаимодействии вращающегося магнитного поля статора с токами в проводниках обмотки ротора. Поэтому вращающий момент зависит как от магнитного потока статора Фт, так и от силы тока в обмотке ротора I2. Однако в создании вращающего момента участвует только активная мощность, потребляемая машиной из сети. Вследствие этого вращающий момент зависит не от силы тока в обмотке ротора I2, а только от его активной составляющей, т. е. I2 cos ψ2, где ψ2 — фазный угол между э. д. с. и током в обмотке ротора.
Таким образом, вращающий момент асинхронного двигателя определяется следующим выражением:

где С — конструктивная постоянная машины, зависящая от числа ее полюсов и фаз, числа витков обмотки статора, конструктивного выполнения обмотки и принятой системы единиц. При условии постоянства приложенного напряжения магнитный поток остается также почти постоянным при любом изменении нагрузки двигателя.
Таким образом, в выражении вращающего момента величины С и Фт постоянны и вращающий момент пропорционален только активной составляющей тока в обмотке ротора, т. е. 
19. Из какого вещества выполняются стержни короткозамкнутого ротора?
20. Как укладываются обмотки асинхронного двигателя?
Ответ: В пазы ротора, аналогично пазам статора, укладываются три фазные обмотки, смещенные в пространстве на 120° относительно друг друга. Обмотки ротора соединяются звездой. Их начала соединяют с медными кольцами, которые вращаются вместе с валом.
21. На чем основан принцип действия трехфазного асинхронного двигателя?
Ответ: принцип действия трехфазного асинхронного электродвигателя основан на способности трехфазной обмотки при включении ее в сеть трехфазного тока создавать вращающееся магнитное поле. Частота вращения этого поля, или синхронная частота вращения прямо пропорциональна частоте переменного тока f1 и обратно пропорциональна числу пар полюсов р трехфазной обмотки. При подаче напряжения на неподвижные обмотки статора, оно создает магнитное в статора. Если подается напряжение переменного тока, то магнитный поток, созданный им, изменяется. Так статор производит изменение магнитного поля, и ротор получает магнитные потоки.
Таким образом, ротор электродвигателя принимает эти поток статора и, следовательно, вращается. Это основной принцип работы и скольжения в асинхронных машинах. Из вышеизложенного следует отметить, что магнитный поток статора (и его напряжение) должно быть равно переменному току для вращения ротора, так что асинхронная машина может работать только от сети переменного тока.
22. Укажите основные недостатки трехфазного асинхронного двигателя с короткозамкнутым ротором при прямом пуске в ход.
Ответ: при включении двигателя в сеть пусковой ток довольно велик, при этом пусковой момент значительно меньше номинального, это несколько ограничивает область применения, и если требуется большой пусковой момент, то асинхронный двигатель с короткозамкнутым ротором не подойдет. Еще одним недостатком асинхронных двигателей с короткозамкнутым ротором является их низкий коэффициент мощности, особенно при малой нагрузке и на холостом ходу, что снижает эффективность такой электрической системы в целом.
23. Герметичная электрическая машина- это…
Герметичная электрическая машина- это такая конструкция электрической машины, которая позволяет повысить надежность работы электрической машины путем обеспечения работоспособности тонкостенного экрана в условиях действия на него наружного давления со стороны полости статора. Кроме того при такой конструкции повышается устойчивость экрана и появляется возможность выполнения его минимальной толщины, что в свою очередь улучшает электрические характеристики машины, в частности, увеличивает КПД.
24. Погружная электрическая машина – это…
Погружная электрическая машина – это такая конструкция электрической машины, при которой погружной электродвигатель с защищенным статором имеет разделительную трубу так, что ротор может омываться технологическим газом, а статор — технологической жидкостью. Применяется он для приведения в действие турбокомпрессора или центробежного насоса.
25. Определите для асинхронного двигателя число n оборотов в минуту вращающегося поля при частоте тока f1= 50 Гц и шестиполюсном статоре.

26. Число пар полюсов асинхронного двигателя увеличили в два раза. Как изменится число оборотов вала двигателя?

27. Что определяет косинус φ (cos φ) асинхронного двигателя?
Ответ: cos φ- коэффициент мощности, рабочая характеристика АД, зависящая от механической мощности на валу двигателя при постоянном напряжении на зажимах статора и постоянной частоте сети
28. Рассчитать скорость вращения вала асинхронного двигателя, если частота вращения магнитного поля статора равна 3000 об/мин, а скольжение двигателя равно 0,02.
29. Определить частоту вращения ротора асинхронного двигателя шестиполюсной машины при частоте сети 50 Гц и скольжении 4%.

30. Вычислить КПД асинхронного двигателя, если в процессе опытов холостого хода, короткого замыкания и при номинальной нагрузке ваттметр, включенный в одну из фаз, показал соответственно 400 Вт, 600 Вт и 10 кВт.

31. Вычислить скольжение в асинхронном двигателе, если при частоте сети 50 Гц частота вращения ротора равна 1470 об/мин.

32. Чему равна ЭДС в неподвижном роторе асинхронной машины, если при скольжении 0,05 ЭДС равна 2 В?

33. Асинхронный двигатель с номинальной мощностью 45 кВт имеет электрические потери 900 Вт, магнитные – 1,2 кВт, механические – 1,5 кВт. Дополнительные потери принять 2% от номинальной мощности. Вычислить КПД асинхронного двигателя.
34. КПД и коэффициент мощности асинхронного двигателя номинальной мощностью 400 Вт соответственно равны 80% и 0,5. Определить полную мощность потребляемую двигателем из сети.
35. Вычислить номинальный вращающий момент трехфазного асинхронного двигателя марки 4АА63А2УЗ, в паспортных данных которого указана номинальная мощность 370 Вт и номинальная частота вращения ротора 2750 об/мин.
Ответ: Формула: M=9,55 P2/n2
9,55*(370/2750)=1,284 н*м
36. Как изменится мощность трехфазного асинхронного двигателя, если напряжение питания уменьшится в 2 раза?
Ответ: P=√3*U*I*cos φ* η
То есть, если понизить напряжение в 2 раза, то и уменьшится сама мощность в два раза.
37. Какой асинхронный двигатель предпочтительно используется в системах автоматического управления?
Ответ: В системах автоматического управления используется трёхфазный асинхронный двигатель.
38. Чему равен момент вращения асинхронного двигателя при скольжении S=0?
Ответ: При режиме идеального холостого хода АД скольжение S=0, момент вращения асинхронного двигателя М=0.
39. Почему электродвигатель называется асинхронным?
Ответ: Разность между частотой вращения магнитного поля статора и частотой вращения ротора характеризуется скольжением. Двигатель называется асинхронным, так как частота вращения магнитного поля статора не совпадает с частотой вращения ротора. В синхронном же двигателе частота вращения магнитного поля статора и частота вращения ротора совпадают.
40. Каково основное достоинство асинхронного электродвигателя с короткозамкнутым ротором?
Ответ: К преимуществам двигателей такого типа, в частности, перед асинхронными двигателями с фазным ротором, относятся простота обслуживания и отсутствие подвижных контактов. Здесь нет щеток и контактных колец, питание подается только на неподвижную трехфазную обмотку статора, что и делает этот двигатель весьма удобным для самых разных сфер применения, практически универсальным. Такой двигатель прост в изготовлении и сравнительно дешев, затраты при эксплуатации минимальны, а надежность высока.
Достоинства асинхронного электродвигателя с короткозамкнутым ротором
· приблизительно постоянная скорость при разных нагрузках;
· возможность кратковременных механических перегрузок;
· простота пуска и легкость его автоматизации;
· более высокие cos φ и КПД, чем у электродвигателей с фазным ротором.
41. Какую частоту (скорость) вращения имеет вращающееся магнитное поле асинхронного электродвигателя при частоте напряжения питающей сети f1=50 Гц и числа пар полюсов Р=2?
42. Как изменить направление вращения асинхронного электродвигателя?
Если двигатель питается непосредственно от трехфазной сети, поменять местами любые два из трех идущих к нему фазных проводов.
Если двигатель питается от однофазной сети — поменять местами два провода пусковой или рабочей обмотки.
43. Частота (скорость) вращения ротора асинхронного электродвигателя nн=1360 об/мин. Определить число пар полюсов обмотки статора двигателя.
Ответ: так как двигатель асинхронный, его частота вращения 1360 об/мин. Меньше, чем вращение магнитного поля. При частоте 50 Гц единственно возможным значением частоты вращения магнитного поля будет 1500 об/мин., что соответствует числу полюсов равным 2.
44. Какую максимальную частота (скорость) вращения в об/мин развивает четырехполюсный асинхронный электродвигатель при частоте напряжения питающей сети f1=50 Гц?
Ответ: максимальная частота магнитного поля при четырехпол., которая развивается при напряжении 50 Гц, будет равна 1500 об/мин. Из этого следует, что частота вращения асинхронного двигателя меньше, чем 1500, однако не знаем насколько. Скороее всего на 2-7% меньше.
45. Как рассчитывается скольжение ротора асинхронного двигателя?
Ответ: S=((n1-n2)/n1)*100%
где n1 – частота вращения поля статора
n2 – частота вращения ротора.
46. Частота (скорость) вращения в пространстве магнитного поля ротора асинхронного двигателя.
Частота вращения ротора в магнитном поле:
n2=((60*f1)/p)*(1-S)
где p – число пар полюсов
f1 – частота напряжения источника питания
S – скольжение
47. Определите номинальную частоту (скорость) вращения nн, если задано: число полюсов Р=3, номинальное скольжение ротора Sн=5%, частота напряжения питающей сети f1=50 Гц.

48. Чему равна частота тока ротора асинхронного двигателя f2, если частота напряжения питающей сети f1=50 Гц и номинальное скольжение ротора Sн=5%?

49. Чему равна частота ЭДС неподвижного ротора асинхронного двигателя, если частота питающего напряжения f1=1000 Гц.
Ротор ас-ого двигателя находится в неподвижном состоянии (двигатель в режиме короткого замыкания), то есть частота вращения ротора n2 = 0, откуда величина скольжения S = (n1-n2)/n1 = 1, где n1 – частота вращения магнитного поля статора.
Синхронная частота вращения магнитного поля статора перемещается относительно ротора с частотой скольжения Δn (Δn = n1-n2). Она же наводит в обмотке ротора ЭДС, частота которой f2 связана со скольжением S через формулу f2 = f1*S.
Таким образом, так как величина скольжения S = 1, а частота сети
f1 = 1000 Гц, можно сказать, что частота ЭДС, при неподвижном роторе,
равна 1000 Гц, то есть f2 = 1000 Гц.
50. Чему равна частота тока ротора асинхронного двигателя f2 при номинальной нагрузке, если номинальная частота (скорость) вращения nн=1350 об/мин, а частота напряжения питающей сети f1=50 Гц.
Асинхронный двигатель работает в номинальном режиме, поэтому воспользуемся следующими формулами:
(3) n1 = f1*60/p, где p – число пар полюсов и равно 2 (из шкалы синхронных частот статора как ближайшее к nH значение).
Подставим (3) и (2) в (1)
ð f2 = f1 – nH*p/60 = 50 – 1350*2/60 = 5 Гц.
51. Как изменится частота ЭДС, наводимой в обмотке ротора асинхронного двигателя при переходе его от режима холостого хода к режиму короткого замыкания, когда ротор заторможен?
Ответ: частота ЭДС будет равна частоте тока обмотки статора.
52. Как изменится частота тока ротора асинхронного двигателя f2 при переходе от пуска к режиму идеального холостого хода двигателя?
53. В каких пределах изменяется скольжение ротора асинхронного двигателя при переходе от режима холостого хода к номинальной нагрузке?
Ответ: во время холостого хода скольжение s≈0. При начальном этапе запуска двигателя s=1. А далее при номинальном режиме работы s может изменятся от 0.03 до 0.07 в зависимости от характеристик двигателя.
54. Как изменяется скольжение ротора асинхронного двигателя при увеличении нагрузки на его валу?
Ответ: если постепенно повышать нагрузку двигателя, то скольжение будет расти (ротор будет все сильнее отставать от вращающегося магнитного поля), при этом пропорционально скольжению будет расти ток, наводимый в роторе, а пропорционально ему будет расти и момент. Поэтому при малых нагрузках можно считать, что момент пропорционален скольжению. Но при росте скольжения возрастают активные потери в роторе, которые снижают ток ротора, поэтому момент растет медленнее чем скольжение, и при определенном скольжении момент достигает максимума, а потом начинает снижаться. Скольжение, при котором момент достигает максимума, называется критическим.
55. Почему ток холостого хода асинхронного двигателя значительно больше, чем ток холостого хода трансформатора?
Ответ: В режиме холостого хода, когда обмотка статора подключена к сети, обмотка ротора разомкнута, а ротор заторможен, физические процессы в АД полностью подобны процессам в трансформаторе при холостом ходе. Отличие заключается только в том, что обмотки статора и ротора распределены по пазам и сопротивление магнитной цепи АД больше, чем в трансформаторе ввиду наличия достаточно большого (0,5 мм и более) воздушного зазора.
Поэтому ток холостого хода Io в АД значительно больше, чем в трансформаторе и может достигать (20-40)% и даже более от номинального тока.
56. Как изменится ток холостого хода асинхронного электродвигателя, если при ремонте уменьшить число витков каждой фазы статора?
Ответ: Потери холостого хода обусловлены потерями в стали. При уменьшении числа витков ток холостого хода увеличится, так как увеличится величина магнитного потока (E=4*Ke*Kобм*f*W*Ф — при уменьшении W увеличивается Ф, так как все остальные параметры постоянны), следовательно увеличатся потери в стали.
57. Как изменится коэффициент мощности cos(φ) асинхронного электродвигателя при переходе от режима холостого хода к номинальной нагрузке?
Ответ: Коэффициент мощности или cos(ф) связан с нагрузкой на валу двигателя, поскольку при разной механической мощности на валу — разной будет и активная составляющая тока статора. Так, в режиме холостого хода, то есть когда к валу ничего не присоединено, коэффициент мощности двигателя минимален. Если же нагрузку на валу начать увеличивать, то активная составляющая тока статора также будет расти, следовательно коэффициент мощности возрастет, и при близкой к номиналу нагрузке окажется максимальным. Если теперь нагрузку продолжить увеличивать, то есть нагружать вал сверх номинала, то ротор будет тормозиться, возрастет величина скольжения, индуктивное сопротивление ротора станет вносить свой вклад, и коэффициент мощности начнет уменьшаться.
58. Как изменится КПДасинхронного электродвигателя при переходе от номинальной нагрузки к режиму холостого хода?
Ответ: КПД в режиме нагрузки будет больше нуля, т.к. есть N вых., N вход, а также N потерь. Тогда Nвых /Nвход = больше нуля. Тогда как в номинальном режиме нагрузки есть N вход и N потерь, где мы смело можем сказать, что N вых = 0., те всё равно 0. Ответ: уменьшается.
59. Как изменится величина реактивной мощности Q, потребляемой асинхронным электродвигателем из сети при увеличении нагрузки на его валу?
Если нагрузку на валу начать увеличивать, то активная составляющая тока статора также будет расти, следовательно, коэффициент реактивной мощности возрастет, и при близкой к номиналу нагрузке окажется равным примерно 0,8 — 0,9.
Если теперь нагрузку продолжить увеличивать, то есть нагружать вал сверх номинала, то ротор будет тормозиться, возрастет величина скольжения s, индуктивное сопротивление ротора станет вносить свой вклад, и коэффициент реактивной мощности начнет уменьшаться.

60. Как изменится КПДасинхронного электродвигателя при переходе от режима холостого хода к нагрузочному режиму?
Какие двигатели получили наибольшее распространение

Бог проявил щедрость,
когда подарил миру такого человека.
Светлане Плачковой посвящается
Издание посвящается жене, другу и соратнику, автору идеи, инициатору и организатору написания этих книг Светлане Григорьевне Плачковой, что явилось её последним вкладом в свою любимую отрасль – энергетику.
Книга 2. Познание и опыт — путь к современной энергетике
-
…
9.1. Первые электродвигатели
Нам уже известны способы преобразования механической энергии в электрическую. Но и энергию электрического тока можно преобразовать в энергию движения. Динамомашину, вырабатывающую электрический ток, называют первичной машиной, или генератором, а устройство, принимающее электрический ток и преобразующее его в механическую энергию, называют вторичной электрической машиной, или электродвигателем. При этом преобразование электрической энергии в механическую, как и обратное, происходит не непосредственно, а за счет явления электромагнетизма.
Уже опыты М. Фарадея, проведенные им ещё в 1821 году, можно считать наглядной иллюстрацией принципиальной возможности построения электродвигателя. Исследуя взаимодействие проводников с током и магнитом, он показал, что электрический ток вызывает вращение проводника вокруг магнита или вращение магнита вокруг проводника с током.
В 1833 г. английский ученый У. Риччи создал прибор, в котором магнитное поле образовывалось постоянным неподвижным магнитом. Между его полюсами на вертикальной оси помещался электромагнит. Взаимодействие полюсов постоянного магнита и электромагнита приводило к вращению электромагнита вокруг оси. Направление тока периодически изменялось коммутатором. Вследствие своей примитивной конструкции и незначительной мощности электродвигатель Риччи не мог получить практического применения.
Рис. 9.1. Автоматический прерыватель
Первые устройства для преобразования электрической энергии в механическую применялись главным образом для получения переменно-возвратного движения в так называемых электрических прерывателях. Основным элементом их является вибрирующий якорь, притягиваемый электромагнитом под действием электрического тока и возвращаемый назад за счет сжатия пружины при разрыве электрической цепи (рис. 9.1). Такие устройства получили достаточно широкое распространение в виде, например, электрических звонков. Но значительно более интересно было преобразовать электрическую энергию во вращательную. Наиболее просто этого можно достичь, прикрепив к вибрирующему якорю шатун, действующий на кривошип вала и производящий при помощи качаний вращательное движение. Примером такой простейшей конструкции может служить электродвигатель Грюэля (рис. 9.2).
Рис. 9.2. Электрический двигатель Грюэля
Увеличивая количество электромагнитов, можно получить значительно более плавное вращательное движение. Две системы электромагнитов первым применил русский ученый Б.С. Якоби, создавший в мае 1834 г. электрический двигатель (рис. 9.3) с вращательным движением якоря, который действовал на принципе притяжения и отталкивания между электромагнитами. В качестве источника питания электромагнитов использовалась батарея гальванических элементов, а для изменения полярности подвижных электромагнитов – коммутатор.
В ноябре 1834 года Якоби представил Парижской академии наук сообщение об этом устройстве. Известие об изобретении Якоби очень быстро распространилось. Сам автор широко демонстрировал свой электродвигатель и подвергал его опробованию для приведения во вращение различных механизмов. Он исходил из законов и представлений Ампера и Фарадея, дополненных собственными исследованиями, проведенными совместно с академиком Э. Ленцем в конце 1830-х годов. В процессе совершенствования двигателя Якоби объединил несколько электродвигателей в один агрегат, расположив неподвижные и вращающиеся магниты в одной плоскости, то есть пошел по пути механического соединения определенного числа элементарных машин. При этом увеличились размеры электродвигателя в вертикальном направлении, а это было удобно для создания опытной судовой установки. В 1838 году Якоби построил первый магнитоэлектрический двигатель, приводящий в движение на реке Неве против течения лодку с четырнадцатью человеками на борту.
Рис. 9.3. Электрический двигатель Якоби
Одна из петербургских газет 1839 года писала об испытаниях «электрического бота»: «… катер с двенадцатью человеками, движимый электромеханической силой (в 3/4 лошади), ходил несколько часов противу течения, при сильном противном ветре… Что бы ни было впоследствии, важный шаг уже сделан, и России принадлежит слава первого применения теории к практике». Испытания электродвигателя Якоби показали возможность практического применения электродвигателей, но в то же время обнаружили, что при питании их током от гальванических батарей (на боте Якоби вначале было установлено 320 гальванических элементов) механическая энергия получается очень дорогой. Произведенные опыты и теоретическое исследование привели Б.С. Якоби к очень важному выводу: применение электродвигателей находится в прямой зависимости от удешевления электроэнергии, то есть от создания генератора, более экономичного, чем гальванические батареи.
Все электрические двигатели постоянного тока, созданные позднее, были по существу лишь усовершенствованием электродвигателя Якоби.
В конце XIX – начале XX века изобретатели во многих странах пытались совершенствовать систему получения, передачи, превращения электричества в механическую работу и приспособить его для перемещения и поднятия грузов, освещения улиц и прочее. В Европе и Америке наибольшее распространение получили электродвигатели малой и средней мощности, используемые в основном для городского электротранспорта и легкой (например швейной и текстильной) промышленности.
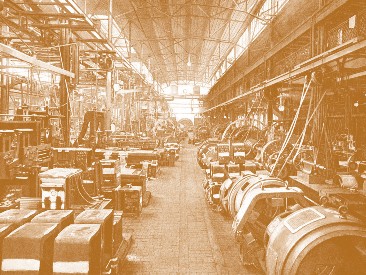 Рис. 9.4. Отделение электродвигателей постоянного тока на заводе Шуккерта в Нюрнберге
Рис. 9.4. Отделение электродвигателей постоянного тока на заводе Шуккерта в Нюрнберге
Рис. 9.5. Электродвигатель постоянного тока производства «Немецких электрических заводов» в Ахене
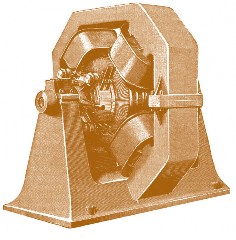 Рис. 9.6. Мощный электродвигатель постоянного тока швейцарской фирмы «Эрликон»
Рис. 9.6. Мощный электродвигатель постоянного тока швейцарской фирмы «Эрликон»
На рис. 9.4 представлен общий вид цеха по производству электродвигателей постоянного тока на заводе Шуккерта в Нюрнберге. Такие электродвигатели в конце XIX века с развитием центральных электрических станций массово устанавливались на крупных заводах Европы и полностью вытеснили дорогой и ненадежный ременной или цепной привод. Лидером по производству электродвигателей постоянного тока в Германии были «Немецкие электрические заводы» в Ахене. Благодаря своей надежности и компактности эти электродвигатели получили большое распространение (рис. 9.5).
В сравнении с другими типами двигателей электродвигатель обладал столь важными преимуществами, что очень быстро стал устанавливаться везде, где только была возможна доставка электрического тока. Прежде всего он отличался легкостью установки, простотой ухода и относительной компактностью в сравнении с другими типами двигателей (например газомоторами) аналогичной мощности. Электродвигатели малой и средней мощности не требовали мощных фундаментов и могли устанавливаться прямо на полу или даже на стенных кронштейнах. Кроме того, при квалифицированном обслуживании эксплуатация их была практически безопасна.
В конце XIX века в Швейцарии серия электродвигателей средней и большой мощности производилась на фирме «Эрликон». При этом на электродвигателях мощностью до 100 л.с. применялся якорь Грамма, а на мощных – до 250 л.с. и более – многополюсный якорь (рис. 9.6). В Америке большое распространение получили электродвигатели небольшой мощности, например двигатели конструкции Франка Спрага (рис. 9.7).
Необходимо отметить, что в начале ХХ века история практического использования электрических двигателей не достигла еще и 15-летнего возраста, но темпы и массовость их применения были очень значительными. Этому способствовали интенсивное строительство центральных городских электрических станций и широко разветвленных распределительных электрических сетей, а также несомненные преимущества электродвигателей в сравнении с паровыми машинами и газомоторами равной мощности. Что касается ухода, то он ограничивался только смазкой подшипников и правильной установкой щеток. Кроме того, с развитием массового применения электрических двигателей центральные городские электрические станции, работавшие в основном в темное время суток для целей электрического освещения, получили возможность значительно более рационально использовать мощности своих генераторов, производя электрическую энергию в дневное время для питания многочисленных электродвигателей. Например, Берлинская центральная электростанция, первоначально созданная в 1884 г. для обеспечения электрического освещения, к концу 1892 г. снабжала электрической энергией 156 электродвигателей постоянного тока общей мощностью в 525 л.с. В следующем году станция снабжала электроэнергией уже 311 электродвигателей мощностью в 1070 л.с., а к 1898 г. общая мощность двигательной нагрузки составила уже 15400 л.с., или 11400 кВт, к которым нужно прибавить еще 2100 кВт двигательной нагрузки электрических железных дорог.
Рис. 9.7. Американский электродвигатель средней мощности конструкции Спрага
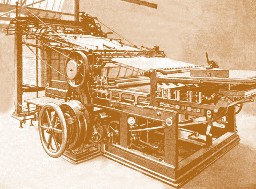 Рис. 9.8. Типографский печатный станок с электрическим приводом
Рис. 9.8. Типографский печатный станок с электрическим приводом
 Рис. 9.9. Электродвигатели в машинном зале завода
Рис. 9.9. Электродвигатели в машинном зале завода
Рис. 9.10. Сушильная центрифуга с электрическим приводом
 Рис. 9.11. Электрический центробежный насос с двигателем Кертинга
Рис. 9.11. Электрический центробежный насос с двигателем Кертинга
Рис. 9.12. Токарный станок с электроприводом
Приход ХХ века ознаменовался массовым использованием электропривода постоянного тока в различных отраслях промышленности. На рис. 9.8 показан типографский печатный станок с электрическим приводом, а на рис. 9.9 – общий вид машинного зала завода с установленными электрическими двигателями.
Одно из несомненных преимуществ использования электрических двигателей заключается в возможности повышения коэффициента полезного действия механизма при отказе от неэффективных и ненадежных ременных и цепных передач и переходе на прямой электрический привод.
Рис. 9.13. Электрический ворот
Рис. 9.14. Электрический лифт
Особенно значительным это преимущество становится при необходимости использования высокооборотного привода. На рис. 9.10 показана сушильная центрифуга с электрическим приводом производства «Немецких заводов» в Ахене, а на рис. 9.11 – электрический центробежный насос с двигателем Кертинга. Такая конструкция нашла широкое применение при разработке промышленных и пожарных помп, т.е. систем для перекачивания воды.
В промышленных и жилых зданиях широко использовались вентиляторы с электрическим приводом. Применение электроприводу нашлось и при производстве различных станков, машин и подъемных механизмов. На рис. 9.12 показан токарный станок с электроприводом, а на рис. 9.13 – электрический ворот, использовавшийся в различных подъемных приспособлениях, например в лифтах (рис. 9.14), или при устройстве транспортировочных механизмов (рис. 9.15). На рис. 9.16 показан общий вид портового крана грузоподъемностью 150 тонн с электроприводом.
Рис. 9.15. Загрузка корабля с помощью электрического транспортера
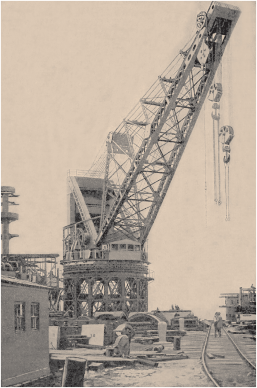 Рис. 9.16. Портовый кран грузоподъемностью 150 тонн с электроприводом
Рис. 9.16. Портовый кран грузоподъемностью 150 тонн с электроприводом
Из области домашнего применения можно отметить электроприводные швейную, сверлильную и даже зубоврачебную машины.

Использование материалов сайта разрешено при условии наличия ссылки на сайт.
Перепечатка материалов с других источников (СМИ, наших партнеров) возможен в случае указания первоисточника.