Рекуперация
Электродвигатели предназначены для приведения в движение различных механизмов, но после завершения движения механизм необходимо остановить. Для этого можно использовать тоже электрическую машину и метод рекуперации. О том, что такое рекуперация электроэнергии, рассказывается в этой статье.

Рекуперация электроэнергии в электровелосипеде
Что такое рекуперация
Название этого процесса происходит от латинского слова «recuperatio», которое переводится как «обратное получение». Это возврат части израсходованной энергии или материалов для повторного использования.
Этот процесс широко используется в электротранспорте, особенно работающем на аккумуляторах. При движении под уклон и во время торможения системы рекуперации возвращает кинетическую энергию движения обратно в аккумулятор, подзаряжая их. Это позволяет проехать без подзарядки большее расстояние.
Рекуперативное торможение
Один из видов торможения – это рекуперативное. При этом скорость вращения электродвигателя больше, чем заданная параметрами сети: напряжением на якоре и обмотке возбуждения в двигателях постоянного тока или частотой питающего напряжения в синхронных или асинхронных двигателях. При этом электродвигатель переходит в режим генератора, а выработанную энергию отдаёт обратно в сеть.
Основным достоинством рекуператора является экономия электроэнергии. Это особенно заметно при движении по городу с постоянно изменяющейся скоростью, пригородном электротранспорте и метрополитене с большим количеством остановок и торможением перед ними.
Кроме достоинств, рекуперация имеет недостатки:
- невозможность полной остановки транспорта;
- медленная остановка при малых скоростях;
- отсутствие тормозного усилия на стоянке.
Для компенсации этих недостатков на транспортных средствах устанавливается дополнительная система механических тормозов.
Как работает система рекуперации
Для обеспечения работы эта система должна обеспечивать питание электродвигателя от сети и возврат энергии во время торможения. Проще всего это осуществляется в городском электротранспорте, а также в старых электромобилях, оснащенных свинцовыми аккумуляторами, электродвигателями постоянного тока и контакторами, – при переходе на пониженную передачу при высокой скорости режим возврата энергии включается автоматически.
В современном транспорте вместо контакторов используется ШИМ-контроллер. Это устройство позволяет возвращать энергию как в сеть постоянного, так и переменного тока. При работе оно работает как выпрямитель, а во время торможения определяет частоту и фазу сети, создавая обратный ток.
Интересно. При динамическом торможении электродвигателей постоянного тока они так же переходят в режим генератора, но вырабатывающаяся энергия не возвращается в сеть, а рассеивается на добавочном сопротивлении.
Силовой спуск
Кроме торможения, рекуператор используется для уменьшения скорости при опускании грузов грузоподъёмными механизмами и во время движения вниз по наклонной дороге электротранспорта. Это позволяет не использовать при этом изнашиваемый механический тормоз.
Применение рекуперации в транспорте
Этот метод торможения используется много лет. В зависимости от вида транспорта, его применение имеет свои особенности.
В электромобилях и электровелосипедах
При движении по дороге, а тем более, по бездорожью электропривод почти всё время работает в тяговом режиме, а перед остановкой или перекрёстком – «накатом». Остановка производится, используя механические тормоза из-за того, что рекуперация при малых скоростях неэффективна.
Кроме того, КПД аккумуляторов в цикле «заряд-разряд» далёк от 100%. Поэтому, хотя такие системы и устанавливаются на электромобили, большую экономию заряда они не обеспечивают.

Схема рекуперации в автомобиле
На железной дороге
Рекуперация в электровозах осуществляется тяговыми электродвигателями. При этом они включаются в режиме генератора, преобразующего кинетическую энергию поезда в электроэнергию. Эта энергия отдаётся обратно в сеть, в отличие от реостатного торможения, вызывающего нагрев реостатов.
Рекуперация используется также при длительном спуске по склону для поддержания постоянной скорости. Этот метод позволяет экономить электроэнергию, которая отдается обратно в сеть и используется другими поездами.
Раньше этой системой оборудовались только локомотивы, работающие от сети постоянного тока. В аппаратах, работающих от сети переменного тока, есть сложность с синхронизацией частоты отданной энергии с частотой сети. Сейчас эта проблема решается при помощи тиристорных преобразователей.

Режим рекуперации поезда
В метро
В метрополитене во время движения поездов происходит постоянный разгон и торможение вагонов. Поэтому рекуперация энергии даёт большой экономический эффект. Он достигает максимума, если это происходит одновременно в разных поездах на одной станции. Это учитывается при составлении расписания.
В городском общественном транспорте
В городском электротранспорте эта система устанавливается практически во всех моделях. Она используется в качестве основной до скорости 1-2 км/ч, после чего становится неэффективной, и вместо неё включается стояночный тормоз.
В Формуле-1
Начиная с 2009 года, в некоторых машинах устанавливается система рекуперации. В этом году такие устройства ещё не давали ощутимого превосходства.
В 2010 году такие системы не использовались. Их установка с ограничением на мощность и объём рекуперированной энергии возобновилась в 2011 году.
Торможение асинхронных двигателей
Снижение скорости асинхронных электродвигателей осуществляется тремя способами:
- рекуперация;
- противовключение;
- динамическое.
Рекуперативное торможение асинхронного двигателя
Рекуперация асинхронных двигателей возможна в трёх случаях:
- Изменение частоты питающего напряжения. Возможно при питании электродвигателя от преобразователя частоты. Для перехода в режим торможения частота уменьшается так, чтобы скорость вращения ротора оказалась больше синхронной;
- Переключением обмоток и изменением числа полюсов. Возможно только в двух,- и многоскоростных электродвигателях, в которых несколько скоростей предусмотрены конструктивно;
- Силовой спуск. Применяется в грузоподъёмных механизмах. В этих аппаратах устанавливаются электродвигатели с фазным ротором, регулировка скорости в которых осуществляется изменением величины сопротивления, подключаемого к обмоткам ротора.
В любом случае при торможении ротор начинает обгонять поле статора, скольжение становится больше 1, и электромашина начинает работать как генератор, отдавая энергию в сеть.

Схема электродвигателя с фазным ротором
Противовключение
Режим противовключения осуществляется переключением двух фаз, питающих электромашину, между собой и включением вращения аппарата в обратную сторону.
Возможен вариант включения при противовключении добавочных сопротивлений в цепь статора или обмоток фазного ротора. Это уменьшает ток и тормозной момент.
Важно! На практике этот способ применяется редко из-за превышения токов в 8-10 раз выше номинальных (за исключением двигателей с фазным ротором). Кроме того, аппарат необходимо вовремя отключить, иначе он начнёт вращаться в обратную сторону.
Динамическое торможение асинхронного двигателя
Этот метод осуществляется подачей в обмотку статора постоянного напряжения. Для обеспечения безаварийной работы электромашины ток торможения не должен превышать 4-5 токов холостого хода. Это достигается включением в цепь статора дополнительного сопротивления или использованием понижающего трансформатора.
Постоянный ток, протекающий в обмотках статора, создаёт магнитное поле. При пересечении его в обмотках ротора наводится ЭДС, и протекает ток. Выделившаяся мощность создаёт тормозной момент, сила которого тем больше, чем выше скорость вращения электромашины.
Фактически асинхронный электродвигатель в режиме динамического торможения превращается в генератор постоянного тока, выходные клеммы которого закорочены (в машине с короткозамкнутым ротором) или включенные на добавочное сопротивление (электромашина с фазным ротором).

Схема динамического торможения асинхронного электродвигателя
Рекуперация в электрических машинах – это вид торможения, позволяющий сэкономить электроэнергию и избежать износа механических тормозов.
Революция, которую не заметили. Рекуперация становится новой генерацией
Техно-порталы и Хабр в частности не раз писали о рекуперации и возможных вариантах промышленного внедрения этого принципа, позволяющего экономить затраты на электроэнергию. Много вопросов было относительно жизненного цикла регенерационных систем, по реальному КПД и по стоимости серийного решения. Любопытные теоретические расчеты, к примеру, ранее приводились тут. Сегодняшние расчеты показывают, что современные рекуперационные системы способны если не превзойти, то как минимум сравняться по потенциалу генерации энергии со всей индустрией возобновляемой энергетики и существенно поменять правила игры на этом рынке.
Рекуперация – изобретение велосипеда? Нет
Технологию стали применять в XX веке. Из школьного курса физики мы знаем, что любой электродвигатель не только потребляет энергию, но и может сам ее произвести. Это происходит во время торможения. Когда с обмотки статора электродвигателя снимается напряжение, он начинает вырабатывать электроэнергию самостоятельно. К примеру, на ж/д транспорте вырабатываемую двигателем энергию передают в общую энергосеть через тяговые подстанции либо через контактную сеть — напрямую другим составам. Именно так поступали в московском метро во времена СССР, когда столичной «подземке» удавалось собирать и повторно использовать до 50% электроэнергии. Да, наше метро умело в ESG-повестку, когда это еще не было трендом.
Момент торможения поезда на станции четко совпадал с отправлением другого — того, что шел в обратную сторону. В итоге энергия от торможения одного поезда становилась топливом для другого. Но в связи с ростом метрополитена Москвы и приоритезацией пассажиропотока над вариантами экономии, рекуперационный баланс был утрачен. Поэтому пока удается собирать только около 10% энергии. Остальное уходит в тормозные резисторы, вырабатывающие тепло, которое необходимо удалять из туннелей метро. Кстати, на удаление этих избытков теряется порядка 53% электроэнергии, расходуемой системой тоннельной вентиляции. Она уступает только потреблению подвижного состава и составляет 0,8–1,2 млн кВт⋅ч в год (расчет-пример по метрополитену Новосибирска). Подобная растрачиваемая в воздух энергия даже получила в отрасли наименование – «энергетические отходы».

Нагрев тормозных резисторов в лондонском метро. Проблема с нагревом воздуха в туннелях метро характерна не только для нашей страны.

Тепловой след тормозящего поезда. Эту энергию можно использовать повторно или бесцельно рассеять в атмосфере
Почему промышленность возвращается к этой теме и заново начинает обсуждать варианты повсеместного использования принципа рекуперации?
На это есть ряд объективных причин, которые мы попробуем рассмотреть.
Можно отметить три главных фактора, которые сдвинули вопрос внедрения рекуперационных систем с (почти) мертвой точки:
Появление новых материалов (современные электролиты);
Кардинально иной форм-фактор современной суперконденсаторной ячейки;
Мировая экологическая повестка со все новыми требованиями для промышленности.
Нет большого смысла рассуждать о том, какой из этих факторов первичен и что чем было порождено, тут все может свестись к «дилемме курицы и яйца». Попробуем разобраться, что происходит сейчас фактически и как это может повлиять на всю электроэнергетическую отрасль.
На первый взгляд, «энергетические отходы», о которых мы упомянули выше, не так вредны, как выбросы заводов или электростанций и до недавнего времени они не являлись темой экологических дискуссий. А такой важный аспект как растрачивание колоссального объема электроэнергии впустую сегодня стоит как слон в комнате и игнорировать его становится с каждым днем все сложнее.
Смотрите сами: ≈ 50% или 13 468 ТВт∙ч от всей вырабатываемой в мире энергии потребляют электродвигатели, способные до половины этого объема вернуть благодаря рекуперации.
Спорить о необходимости использования этих, уже имеющихся, экологически чистых энергетических ресурсов излишне. В мире ежегодно возводятся все новые объекты возобновляемой энергетики (ВИЭ). В конце прошедшего года на Хабре уже писали, что Международное энергетическое агентство сообщает о том, что в 2021 году будет установлен мировой рекорд по производству возобновляемых источников. Это превышает достижения 2020 года. До конца 2021 года будет введено 290 ГВт дополнительных мощностей по производству «зеленой» энергии. Солнечные электростанции продолжают в буквальном смысле «запечатывать» сельскохозяйственные площади по всему миру, ветряки врезаются в экосистему, неизбежно оказывая на нее свое влияние, гидроэнергетика доступна далеко не везде. И это при том, что внятных и экономически обоснованных способов утилизации отслуживших ВИЭ-мощностей еще никто не предложил. Даже такая страна как США, которая очень внимательна к вопросам экологии как минимум на своей территории, пока вынуждена попросту захоранивать отслужившие лопасти ветряков, ввиду невозможности их переработать.
Поэтому сегодня все больше отраслей задумываются над тем как взять уже выработанные тераватты в час электроэнергии, которые попросту выбрасываются в воздух.
Новые возможности
Безопасность является приоритетным понятием, когда мы говорим о транспорте и вариантах оптимизации его использования.
Появление нового, пожаробезопасного электролита на основе пропиленкарбоната для суперконденсаторов, позволило создать рекуперационные системы для транспорта, и в частности метрополитена, с его закрытыми пространствами. Жесткие требования к этим характеристикам не позволяли использовать системы с электролитами предыдущего поколения, которые при горении выделяли пары синильной кислоты. Новый электролит в этом плане безопасен и экологичен. По составу он, пожалуй, более всего схож с губной помадой.
Вторым важным фактором стал форм-фактор новых суперконденсаторных ячеек призматической формы, которая стала залогом отсутствия нагревов контактной части.

Токосъем на этих «плитках» распределен по всей поверхности, что позволяет отказаться от системы принудительного охлаждения. В то же время классический вид суперконденсаторных модулей более всего похож на банку Колы, где токосъем представлен двумя проводками на ребре ячейки. Выполняя свою главную функцию (прием и выдача большого объема энергии за раз), эти места нагреваются и являются своего рода ахиллесовой пятой суперконденсаторов предыдущего поколения. В отличие от призматических ячеек, решения на основе «банок» также занимают гораздо больше объема. А к объему добавляем еще и систему охлаждения.
Появление нового электролита и форм-фактора открыло возможности оборудования рекуперационными системами самого широкого спектра транспорта, а также другой техники, использующей электромоторы.
Испытания, проведенные российскими разработчиками и производителями рекуперационных систем из компании ТЭЭМП показали, что, к примеру, трамвай может регенерировать порядка 40% энергии, потребляемой при разгоне. Это 142 кВтч в день только с одной единицы транспорта — цифры сопоставимы с ежедневной выработкой солнечного парка в 1000 м².
Всего в России около 7700 трамваев. Если поставить на них систему накопления энергии, они выработают около 400 000 МВт*ч электроэнергии за год. Это позволит сэкономить на «топливе» более $29 млн и снизит выбросы CO2 в атмосферу на 180 тыс. тонн.
Если переложить показатели на масштабы такой компании, как РЖД, становится понятно, что потенциал экономии бюджетных средств может быть огромен. Крупнейший ж/д перевозчик потребляет порядка 6% всей электроэнергии, вырабатываемой в России. Почему бы не собрать эту энергию и не использовать ее повторно? Это поможет сэкономить до 50% бюджета на электроэнергию и уменьшить объем выбросов углекислого газа.
«Транспорт» может быть разным
С появлением гибридных болидов рекуперация пришла и в Формулу 1. Специально для нее в 2009 году создали KERS — кинетическую систему восстановления энергии. И польза от нее не только в экономии энергии. Система дает болидам буст, своеобразный «нитро» — прямо как в компьютерный играх. В 2014 году в автомобили стали устанавливать сразу две системы рекуперации: суммарно они увеличили их мощность на 160 л.с.
Как работает система: на трансмиссии собирается энергия, которая вырабатывается при торможении. Сопротивление генератора обеспечивает дополнительное тормозное усилие, и в то же время способствует заряду батарей болида. Когда нужна дополнительная мощность, пилот просто нажимает кнопку на руле и получает дополнительное ускорение. Электроника посылает заряд батареи на генератор, и он дает 80 дополнительных л.с. в течении почти 7 секунд.
Появление системы даже повлияло на стратегию управления болидом. Пилоты стали использовать технологию при выходе из поворотов на медленной и средней скорости. Также KERS используют на конкурентных участках — для обгона соперника или защиты позиции в гонке.
Говоря о новом форм-факторе, можно отметить, что это как раз один из тех кейсов, когда занимаемый объем и вес суперконденсаторного модуля критически важен.
Себастьян Феттель объясняет, как правильно использовать KERS
Также как и на гоночных болидах, на обычных серийных автомобилях устанавливают системы рекуперации — они запасают энергию при торможении и отдают ее двигателю обратно, когда это необходимо.
Система работает на автомобилях в рамках функции «старт-стоп». В момент сильной нагрузки на двигатель внутреннего сгорания генератор отключается, чтобы сэкономить энергию. И снова начинает работу в момент торможения — благодаря этому заряжается батарея аккумулятора. Однако тут содержится изрядная степень лукавства маркетологов – КПД подобных рекуперационных систем нигде не указывается и зачастую не превышает 3%, так как в качестве накопителя традиционно используется литий-ионный аккумулятор, не способный принимать весь объем потенциально возможной рекуперированной энергии.
Где еще?
Рекуперация находит свое применение не только на транспорте. Лифты и подъемные краны являются одним из наилучших и наиболее эффективных платформ, которые могут превращаться в импровизированную электростанцию попросту исходя из физики своей работы. По данным шведских исследователей из университета Gävle, при использовании систем рекуперации на основе суперконденсаторов на подъемно-транспортном оборудовании выработка
75% от затраченного.

По сути все лифтовое хозяйство может также служить в качестве генерации. Это подтверждает опыт, полученный компанией Otis (передача энергии в домовую сеть) и испанским решением Epic Power (передача в накопитель с последующим использованием). Обе компании подтвердили эффективность на уровне 75%.
А что новенького у нас?
Energy ReCycler. Так называется рекуперационная система на основе современных суперконденсаторов, которая производится компанией ТЭЭМП. Технологию можно использовать для трамваев, поездов и электричек. Она работает на основе суперконденсаторов, что позволяет рекуперировать гораздо больше энергии, получаемой от торможения, чем это дают сделать литий-ионные накопители – 40% против 3-5%. В системе используется безопасный электролит нового поколения, а заявленный ресурс превышает 1 миллион циклов заряд-разряд. К тому же, данная система не требует регулярного обслуживания.
Исполнительный директор АО «НПП «ЭПРО», к.т.н. Владимир Анатольевич Шаряков:
«С электротранспортом мы работаем с 1991 года и у нас была хорошая возможность изучить очень многие нюансы его использования, понять каким образом расходуется энергия и где есть потенциал ее экономии. Испытания, которые мы провели совместно с московской компанией ТЭЭМП на трамвайном транспорте в Санкт-Петербурге показали, что современные системы рекуперации на основе суперконденсаторов позволяют повысить энергоэффективность подвижного состава на 40%. И эта энергия, собранная методом рекуперации в суперконденсаторы, может быть использована на месте для разгона трамвая либо повышения его автономности на участках, где питания сети отсутствует. При этом можно избежать потерь, связанных с передачей энергии по сети. Игнорировать подобные новые инструменты сохранения энергии в современных реалиях было бы попросту неразумно».
Energy ReCycler доказал свою эффективность на первых испытаниях, сейчас его используют на других тестовых проектах. По словам инженеров, окупаемость разработки в российских условиях — около 5 лет.
Что такое рекуперация и какой бывает?

О повторном использовании ресурсов и вообще любых благ в последние годы не говорит только ленивый – сейчас это уже не только экономия собственных средств, но и вклад в будущее планеты, которая, судя по всему, все-таки немного устала от нашей чрезмерной активности.
Тем временем во многих системах и механизмах давно уже предусмотрен принцип рекуперации, который якобы позволяет частично компенсировать затраты за счет повторного использования теряемых ресурсов. Если вы все еще не понимаете, как это работает, рассмотрим принцип рекуперации подробнее, в том числе с конкретными примерами.
Что это такое?
Само слово «рекуперация» в переводе с латыни значит «обратное получение» или «возмещение». Предполагается, что мы что-то теряем, но благодаря продуманной схеме инженерного оборудования или развитым технологиям повторной переработки получаем возможность еще раз использовать то, что можно было считать уже утерянным. Говоря простыми словами, рекуперация – это повторное использование чего-либо.
В настоящее время с примерами рекуперации можно столкнуться в различных отраслях человеческой деятельности – они могут касаться как неких материальных ценностей, так и энергии всех видов. Благодаря рекуперации товары и услуги становятся дешевле в производстве, а следовательно, и на рынке, кроме того, снижается нагрузка на Землю в целом, а иногда – и на некоторые инженерные сооружения. На самом деле понятие рекуперации весьма обширное и при этом очень простое, но без конкретных примеров человеку, впервые столкнувшемуся с этим явлением, может быть сложно охватить его целиком. Чтобы исправить эту ситуацию, пройдемся вкратце по разным видам рекуперации.
Обзор видов рекуперации
Чтобы вникнуть в суть рекуперации, надо привыкнуть к мысли, что данное понятие применимо практически в любых отраслях и сферах человеческой деятельности, лишь бы там предполагалось повторное использование материалов или энергии. При этом речь не всегда идет о том, что повторное применение будет происходить по аналогии с первичным – просто «мусор» пытаются рассматривать как нечто полезное. При этом подлежащие рекуперации вещества и предметы могут нуждаться в дальнейшей переработке, тогда как в оригинальном виде действительно представляют собой просто мусор, однако, это тоже пример рекуперации.
В то же время обязательным признаком рекуперации является снижение расходов, достигнутое благодаря такому подходу. Хорошим примером может стать повторное использование растворителей – на первый взгляд, использованная жидкость уже не годится для какого-либо практического применения. Однако элементарные знания химии подсказывают, что необходимый набор атомов для восстановления первоначальной формулы в получившемся бесполезном веществе сохранился, а значит, должен существовать реагент или метод обработки, позволяющий отсеять все лишнее и снова получить растворитель.
Если восстановление в силу дешевизны процесса или дороговизны изначального продукта выглядит экономически целесообразнее, чем закупка новой партии растворителей, или хотя бы имеет смысл с точки зрения экологии, то рекуперация оказывается вполне оправданной.
На первый взгляд, воды на планете так много, что выпить ее всю не получится, тем более, что она постоянно циркулирует в природе. Тем не менее, ученые не зря постоянно трубят о том, что воду надо беречь – хоть она и остается на нашей планете, но может оказаться менее доступной, чем это было раньше. На самом деле подобное явление уже и так характерно для нашей планеты – если в Сибири, например, рек намного больше, чем людей и всей остальной живности, то в пустынных регионах из-за своей редкости она превращается в огромную ценность.
При этом даже крупные водоемы под влиянием человеческой деятельности могут отступать, и перерасход воды способен превратить в пустыню даже ту местность, в которой раньше были и реки, и озера.
Рекуперация сточных вод актуальна во всех случаях – когда человечество просто демонстрирует ответственное отношение к последствиям своего потребительского размаха, или закупка новой воды обходится достаточно дорого (как в некоторых арабских странах), или просто для того, чтобы не загрязнять чистые водоемы. Важно понимать, что вода воде – рознь: некоторое время назад люди не стесняясь пили воду из рек, и далеко не всегда это оканчивалось плачевно, а сегодня так рисковать не стоит, потому что бактерии давно перестали быть главной опасностью.
Рекуперация воды может означать ее очистку как для повторного использования, так и даже для сброса назад в водоемы. Прибегать к ней можно даже в условиях собственной дачи – например, вода, использованная для мытья овощей и фруктов (без моющих средств), в дальнейшем может быть еще раз использована для полива грядок.
В промышленности аналогов этого процесса может быть намного больше.
Отходов
Другая популярная тема экологической повестки говорит о том, что человечество производит слишком много отходов. Чаще всего упоминают о пластике, но даже без него дело обстоит не слишком хорошо – можно себе представить, сколько мусора производят восемь миллиардов человек ежедневно. Мы вряд ли хотим жить на свалке, но без мусорной рекуперации рискуем со временем и по мере роста населения завалить отходами всю планету. Тем временем некоторые из отходов вполне могут применяться повторно. В первую очередь это тот же пластик, который во многих случаях может быть переплавлен для изготовления чего-то нового. Сам по себе такой материал стоит не так уж дорого, потому в экономическом смысле компаниям зачастую проще изготовить новую пластмассу, чем собирать по свалкам старую, однако, для будущего планеты такая мера просто необходима.
Еще одним ярким примером того, что можно и нужно использовать повторно, является металл, особенно цветной. Многие потребители выбрасывают старую технику, не задумываясь о том, что внутри нее, возможно, есть медь. Тем временем этот материал стоит довольно дорого, и причина для этого очевидна – земные запасы такого минерала не столь уж велики. Рано или поздно мы, не придумав адекватного заменителя, столкнемся с тем, что меди на всех уже не хватает, но уже сейчас многим мелким производителям проще порыться в старом мусоре, чем договориться о закупке у добывающих предприятий.
Ситуация с бутылочным стеклом одновременно похожа и не похожа на ту, что сложилась с металлами.
- запасы ингредиентов для производства стекла у нас пока что не иссякают, и произвести такой продукт можно при сравнительно небольших расходах.
- стопроцентная переработка битой тары без добавления нового сырья не представляется возможной – по крайней мере, качество будет потеряно. Поэтому в данном случае рекуперация нужна во многом по аналогии с пластиком – просто для того, чтобы не приумножать площадь территорий, уже и так занятых под свалку.
Отдельно следует сказать об органических отходах. Многие граждане рассуждают так, что недоеденная пища со временем просто перегниет, а органика природе не навредит даже на свалке. Во многих случаях так оно и есть, однако, принцип рекуперации заключается в том, чтобы повторно использовать все, что только возможно. На сегодняшний день разработаны методики компостирования пищи растительного происхождения.
Если вы сами являетесь дачником, было бы намного разумнее делать питательный компост самостоятельно, чем платить отдельно как за вывоз больших количеств мусора, так и за покупку органических удобрений.
Воздуха
Когда рассуждают о рекуперации воздуха, имеют в виду повторное использование, а в данном случае правильнее было бы говорить вообще о сохранении не столько газа как такового, сколько тепловой энергии, которую он несет. Воздушная рекуперация применяется в любых современных системах вентилирования и помогает существенно сэкономить зимой на отоплении, а летом – на кондиционировании помещений.
Рассмотрим, как это работает. Вентиляционная шахта неизбежно связывает между собой две среды, температура которых наверняка отличается хотя бы на несколько градусов. Такая разница особенно заметна, если одна из таких сред – это помещение, в котором включены отопительные приборы или кондиционер, а за окном, соответственно, лютые морозы или знойное лето. Совсем без вентиляции люди внутри помещения рано или поздно обеспечат критическое содержание углекислого газа в воздухе и поставят себе в очень нехорошее положение. Однако вентиляция не мешает поддержанию заданной температуры!
Существует несколько вариантов так называемых рекуператоров – механизмов, которые устанавливаются в вентиляционной шахте. Вне зависимости от вида конструкции, задача такого устройства – разделять входящие и исходящие воздушные потоки, чтобы они не перемешивались. Перегородка между потоками при этом, как правило, делается из некоего теплоемкого материала, способного быстро нагреваться и так же легко отдавать тепло.
Зимой из помещения по одному каналу выходит наружу теплый воздух, а внутрь должен бы попадать холодный с улицы. Однако теплоемкая перегородка забирает у воздушной массы тепловую энергию и тут же отдает ее входящему холодному потоку, обеспечивая, таким образом, сохранение тепла. Точно так же, но наоборот, эта система работает и летом: жаркий воздух с улицы накаляет перегородку, отдавая ей свое тепло, но та тут же отдает тепловую энергию в выводящий канал. Как итог, попадающий с улицы воздух не нарушает атмосферу легкого холода в помещении.
7.10. Примеры реализации цикловых роботов с рекуперацией энергии
Примеры реализации цикловых роботов е рекуперацией энергии позволили проверить основные положения разработанных инженерных методик синтеза и расчета привода, рекуператоров энергии и исполнительных механизмов.
Первый экспериментальный макет системы с тремя степенями подвижности (А. с. 1006208 СССР, МКИ в 25J9/00) обеспечивал позиционирование захватного устройства в 2 3 =8 точках рабочей плоскости (рис. 7.11). Это частный случай системы, показанной на рис. 7.10, а, при JV = 3 с кинематическими передачами от звеньев к рекуператорам энергии. Обобщенные координаты ψ1, ψ2, ψ3 соответствуют установке рекуператоров на основании. Подвижные звенья снабжены дополнительными уравновешивающими массами.
Манипулятор, установленный на основании /, имеет последовательно шарнирно соединенные звенья 2, 3, 5, захватное устройство 6, укрепленное на звене 5. Звено 2 с помощью шарнира (вращательной пары) связано с основанием 1. Маховики 10—12 на валах приводов звеньев 2, 3, 5 манипулятора соответственно установлены также на основании / и являются входными элементами соответствующих приводных кинематических цепей. При этом маховик 10 зубчатой передачей связан со звеном 2, маховик 11 зубчатой передачей и тросовой передачей 9 — со звеном 3, а маховик 12 зубчатой передачей и двумя тросовыми передачами 7 — со звеном 5. На звене 3 предусмотрена уравновешивающая масса 8, а на звене 5 — уравновешивающая масса 4.
На основании 1 смонтированы регулируемые фиксаторы, ограничивающие движения маховиков 10—12.
Р

Рисунок 10 7.11 — Экспериментальный макет промышленного робота
екуператоры для всех степеней подвижности выполнены одинаковыми по схеме, показанной на рис. 7.12,а. Звено 1 манипулятора связано с двигателем 9 системой зубчатых колес 10, 11, 8, 12, причем зубчатые колеса 8 и 11 установлены соосно и имеют возможность относительного перемещения в пределах регулируемого зазора. Кроме того, колесо 11 несет два кулачка 7, взаимодействующие с толкателем 6 фиксатора. Рекуператор содержит два упругих элемента — пружины 5 жесткости с, взаимодействующих с рычагом 3, жестко связанным с колесом 8. На рычаге 3 смонтированы два зуба 4, служащие для фиксации этого рычага в крайних положениях. Пружины 5 установлены с предварительным натягом, а зоны работы каждой из них разделены упором 2.
одинаковыми по схеме, показанной на рис. 7.12,а. Звено 1 манипулятора связано с двигателем 9 системой зубчатых колес 10, 11, 8, 12, причем зубчатые колеса 8 и 11 установлены соосно и имеют возможность относительного перемещения в пределах регулируемого зазора. Кроме того, колесо 11 несет два кулачка 7, взаимодействующие с толкателем 6 фиксатора. Рекуператор содержит два упругих элемента — пружины 5 жесткости с, взаимодействующих с рычагом 3, жестко связанным с колесом 8. На рычаге 3 смонтированы два зуба 4, служащие для фиксации этого рычага в крайних положениях. Пружины 5 установлены с предварительным натягом, а зоны работы каждой из них разделены упором 2.
Рекуператоры имеют две особенности.
Рисунок 11 7.12 — Схема рекуператора
о-первых, вследствие полной динамической развязки за счет соответствующего выбора инерционных параметров звеньев руки стало возможным синтезировать упругую характеристику рекуператора по критерию максимального быстродействия при ограничении динамических нагрузок. В данном случае она выбрана кусочно-линейной (рис. 7.12, б):
М = —сψ – Psgnψ, (7.18)
где М — момент, действующий на рычаг 3, от упругих элементов 5; т)з — угол отклонения рычага 3 от нейтрального положения; Р — предварительный натяг. Из формулы (7.18) следует, что чем меньше с, тем ближе развиваемый упругими элементами момент М (определяющий динамические нагрузки в системе) к кусочно-постоянному ±Р. Это приводит к более форсированному режиму движения: ускорение и замедление держатся постоянными и максимально допустимыми на соответствующих интервалах движения (см. рис. 7.1, д, в рассматриваемом случае вместо синусоиды будут получаться отрезки парабол).
Во-вторых, управление фиксаторами и подкачка энергии в систему осуществляется от одного двигателя 9. Для этого, как отмечалось, колеса 8 я 11 установлены с возможностью относительного перемещения в пределах зазора. При включении двигателя 9 и перемещении колеса // в пределах зазора связанный с ним кулачок 7 отводит толкатель 6 с фиксатором. Система освобождается и начинает движение под действием пружины 5, а двигатель, выбрав зазор между колесами 8 и 11, сообщает системе энергию, необходимую для компенсации потерь на трение.
Первые эксперименты на макете подтвердили преимущества системы с рекуператорами перед системами, построенными по
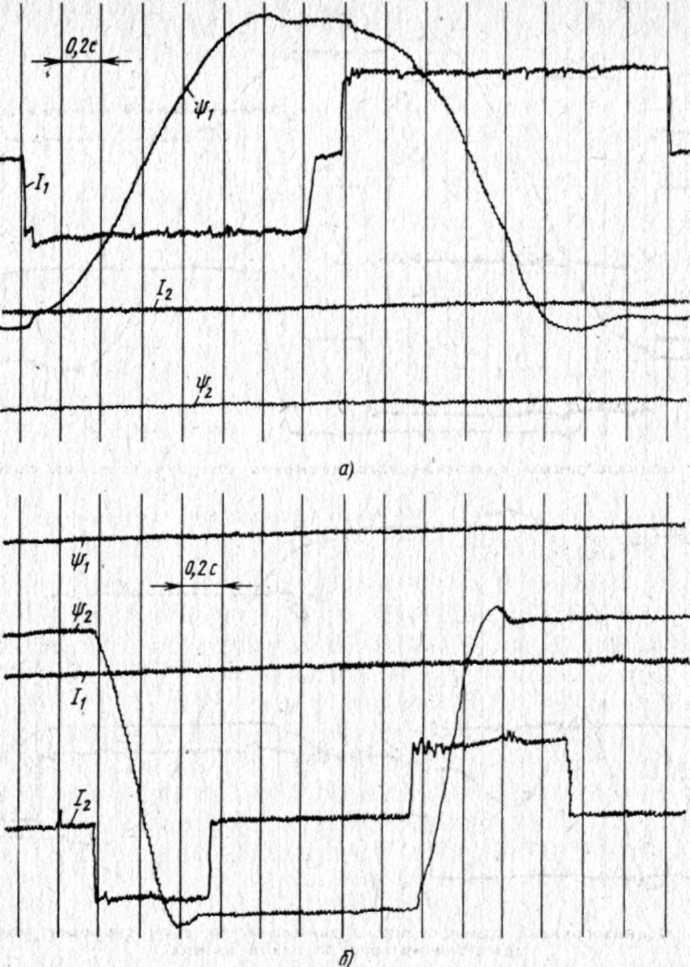
Рисунок 12 7.13 — Осциллограммы раздельных движений по первой и второй степеням подвижности
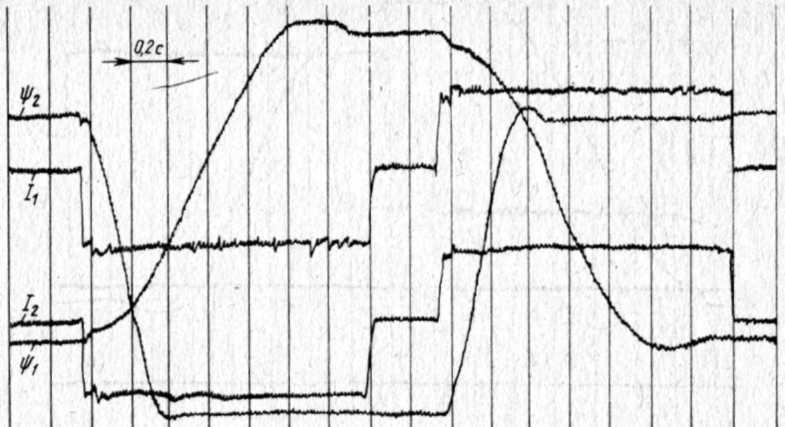
Рисунок 13 7.14 — Осциллограммы одновременного движения по двум степеням подвижности
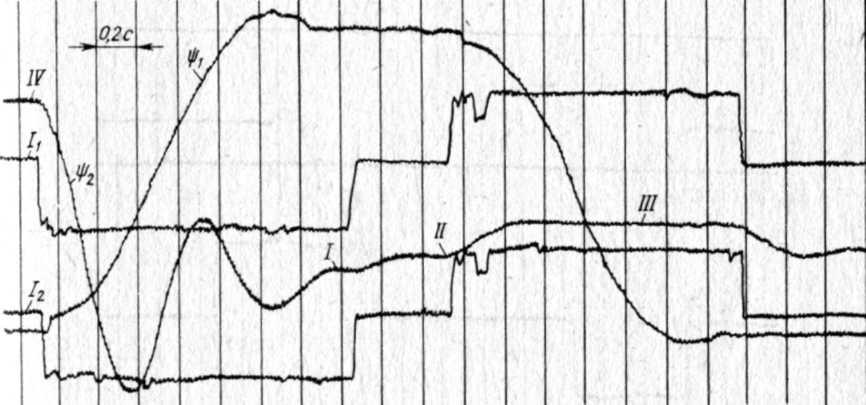
Рисунок 14 7.15 — Осциллограммы одновременного движения по двум степеням подвижности при наличия сбоя по одной из них

 традиционной схеме, как по критерию быстродействия, так и по потребляемой мощности. При одинаковых характеристиках рекуператоров и мощности двигателей 6 Вт для манипулятора общей массой 2,5 кг получены средние угловые скорости: по первой степени подвижности 6 рад/с, по второй 11 рад/с, по третьей 20 рад/с. Эти значения не являются предельными.
традиционной схеме, как по критерию быстродействия, так и по потребляемой мощности. При одинаковых характеристиках рекуператоров и мощности двигателей 6 Вт для манипулятора общей массой 2,5 кг получены средние угловые скорости: по первой степени подвижности 6 рад/с, по второй 11 рад/с, по третьей 20 рад/с. Эти значения не являются предельными.
Таким образом, по сравнению с традиционными конструкциями цикловых роботов рассмотренные технические решения позволяют ориентировочно повысить быстродействие в 3 . 4 раза при одновременном уменьшении мощности приводов на один порядок.
Серия осциллограмм, полученных на макете, приведена на рис. 7.13—7.16. Здесь представлены законы изменений динамически независимых координат ψ1 (t) и ψ2 (t), т. е. выходов рекуператоров первого и второго звеньев руки, и соответственно токи /j и /2 в обмотках двигателей этих звеньев; закон изменения координаты ψ3 (t) показан на рис. 7.16.
Осциллограммы на рис. ‘7.13, а соответствуют работе только первой степени подвижности. На рисунке видно, что при включении двигателя (кривая It) движение начинается с запаздыванием 0,03 с. При этом сначала выбирается зазор в системе механических передач от выходного элемента аккумулятора до звена (ступенька на кривой l]^), затем осуществляется плавное перемещение, включающее зависящее от настройки системы перерегулирование, и фиксация на упоре. Реверсирование момента двигателя приводит к обратному движению системы с фиксацией в исходной точке. При этом все особенности кривой на прямом ходе повторяются и на обратном ходе.
Аналогичные осциллограммы для второй степени подвижности приведены на рис. 7.13, б. Движения здесь осуществляются за существенно меньшее время.
О дновременное движение по двум степеням подвижности иллюстрируют осциллограммы на рис. 7.14. Здесь характер движений по каждой степени подвижности не изменился, что говорит о малых динамических взаимовлияниях в системе. Этот факт подтверждается осциллограммой на рис. 7.15, где движение по первой степени подвижности происходило от одного фиксатора до другого, а по второй — совершались затухающие колебания, обусловленные искусственным выключением из работы одного из упоров-фиксаторов. При этом соответствующий рекуператор в процессе колебаний полностью разрядился. Отметим, что осциллограммы на рис. 7.13—7.16 свидетельствуют, что токи двигателей в процессе движений практически не м
дновременное движение по двум степеням подвижности иллюстрируют осциллограммы на рис. 7.14. Здесь характер движений по каждой степени подвижности не изменился, что говорит о малых динамических взаимовлияниях в системе. Этот факт подтверждается осциллограммой на рис. 7.15, где движение по первой степени подвижности происходило от одного фиксатора до другого, а по второй — совершались затухающие колебания, обусловленные искусственным выключением из работы одного из упоров-фиксаторов. При этом соответствующий рекуператор в процессе колебаний полностью разрядился. Отметим, что осциллограммы на рис. 7.13—7.16 свидетельствуют, что токи двигателей в процессе движений практически не м еняются. Это обусловлено малыми частотами вращения двигателей по отношению к номинальным — токи двигателей равны пусковым.
еняются. Это обусловлено малыми частотами вращения двигателей по отношению к номинальным — токи двигателей равны пусковым.
Уровни участков I—III выстоя кривой ψ2 на рис. 7.15, соответствующие включению двигателя в положительном направлении, выключению двигателя и включению его в отрицательном направлении при разряженном рекуператоре, иллюстрируют, что момент двигателя незначителен по сравнению с моментом, развиваемым рекуператором. Мом
Рисунок 16 7.17 — Опытно-промышленный образец быстродействующего робота с рекуперацией энергии: а — общий вид; б — кинематическая схема
ента двигателя достаточно лишь для того, чтобы сместить систему с участкаIIна участок III или на участок I, в то время как момент, развиваемый рекуператором, соответствует перепаду кривой между участками II и IV.
Одновременные движения всех трех степеней свободы макета иллюстрирует осциллограмма на рис. 7.16. Хорошо видны существенные различия между скоростями трех движений, которые обусловлены разницей в массах звеньев, так как упругие характеристики рекуператоров одинаковы.
Эксперименты показали, что система мало чувствительна к точности уравновешивания второго и третьего звеньев. При погрешности балансировки до 10 % наблюдалась устойчивая работа системы при одновременном срабатывании рекуператоров.
Полученные теоретические и экспериментальные результаты позволили приступить к созданию робота с цикловым управлением для обслуживания быстродействующих прессов. В настоящее время прессы могут работать со скоростью 60 . 80 ударов в минуту, а скорость обслуживающих их роботов, как правило, не превышает 10 циклов в минуту. Недостаточное быстродействие роботов ограничивает производительность штамповочных робототехнических комплексов. Опытно-промышленный образец робота с рекуператором энергии (рис. 7.17), созданный совместно ИМАШ АН СССР им. А. А. Благонравова и НПО «Техноприбор» (г. Смоленск), имеет быстродействие до 25 циклов в минуту.
Предлагаемая схема позволяет с помощью дополнительного звена упростить ввод захватного устройства робота в рабочую зону оборудования, что обеспечивает расширение функциональных возможностей, а также позволяет облегчить подвижные звенья манипулятора, уменьшить их размеры и массу, а следовательно, улучшить динамические качества робота и в первую очередь его быстродействие.
Промышленный робот (см. рис. 7.17, б) состоит: из неподвижного основания 1, на котором установлен манипулятор, образованный подъемно-поворотным рычагом 5, соединенным с основанием 1 поступательной 15 и вращательной 2 кинематическими парами, оси которых параллельны; индивидуальных приводов поступательного и вращательного движений захватного устройства, включающих двигатели 3, 21 и аккумуляторы механической энергии в виде пружин 5, 13, 18, 20; программно-управляемых упоров-фиксаторов 4, 7, 17, 19 крайних положений и кинематических цепей 16 для обеспечения перемещений подъемно-поворотного рычага 8 и захватного устройства 9. Робот также снабжен дополнительным звеном 10, соединенным вращательной кинематической парой 11 с подъемно-поворотным рычагом 8, и кинематической передачей 12, связывающей звено 10 с основанием 1. При этом приводы манипулятора установлены на основании, а механизм развязки вращательного и поступательного перемещений выполнен в виде соосной передачи винт—гайка, ось которой совпадает с осью вращения подъемно-поворотного рычага 8. Один из элементов — винт 14 — связан с приводом поступательного движения захватного устройства, а другой элемент — гайка 6 — жестко соединен с подъемно-поворотным рычагом 8 и кинематически связан с приводом вращательного движения захватного устройства.
Кинематическая передача 12, связывающая звено 10 с основанием 1, может быть выполнена на гибких элементах, например тросах или цепях, а ее передаточное отношение i и отношение £ длины звена 10 к длине подъемно-поворотного рычага 8 должны удовлетворять условию i = 1 + π/[π — 2 arcsin (1 — £)], если захватное устройство необходимо перемещать по траектории,

Рисунок 17 7.18 — Примеры компоновки промышленного робота на прессе
близкой к прямой, при заданном расстоянии L от этой прямой до оси поворота подъемно-поворотного рычага 8.
Компоновка робота 1 на прессе 3 с возможностью прохода между колонками штампа 2 показана на рис. 7.18, а. При £ = в= 0,293 и i — 3 поворот подъемно-поворотного рычага 8 на угол я/2 вызывает поворот звена 10 (см. рис. 7.17) относительно вертикальной оси на угол я, причем центр захватного устройства будет двигаться приближенно по прямой I—I с ходом s = 21 и L = 0,707/ (см, рис. 7.18, а). При i = 1 звено 10 (см. рис. 7.18, б) сохраняет свою ориентацию в пространстве. В этом случае траекторией поступательного движения звена 10 будет окружность.
При компоновке, показанной на рис. 7.18, а, манипулятор за счет звена 10 и кинематической связи 12 этого звена с основанием 1 (см. рис. 7.17) обеспечивает почти прямолинейное движение захватного устройства 9, а не движение по окружности. Таким образом, всегда можно расположить робот на боковой стороне станины пресса так, чтобы траектория захватного устройства проходила между направляющими боковыми колонками штампа. Поворот манипулятора осуществляется за счет привода, включающего двигатель 21 и пружинные аккумуляторы 18, 20. Благодаря тому, что привод подъема манипулятора вынесен на основание, перемещаемая масса манипулятора уменьшается и, следовательно, собственная частота и быстродействие увеличиваются. При повороте рычага в передаче винт—гайка имеет место некоторое поступательное перемещение манипулятора в вертикальном направлении. Однако передаточное отношение винт—гайка может быть выбрано достаточно большим, в результате чего достигается приближенная кинематическая развязка этих двух степеней подвижности.
Таким образом, при использовании предлагаемой схемы путем ввода дополнительного звена и кинематической передачи, связывающей звено с основанием, существенно упрощается ввод захватного устройства в рабочую зону оборудования. Это обеспечивает расширение функциональных возможностей робота, а также облегчает подвижность звеньев манипулятора, уменьшает их размеры и массу за счет вынесения всех приводов на основание, улучшая динамические качества робота.
Робот описанной конструкции имеет грузоподъемность 0,2 кг. Этот робот, устанавливаемый на боковой поверхности станины пресса, не занимает зоны оператора-наладчика с лицевой стороны пресса и обслуживает его, пронося предметы производства между колонками штампа.
Очевидные положительные качества промышленных роботов с цикловым управлением и рекуперацией механической энергии стимулируют попытки оснастить более сложные промышленные роботы, а именно позиционные, рекуператорами энергии (А. с. 733975 СССР, МКИ В 25 J 9/00). Управление движениями позиционных роботов осуществляется с помощью датчиков обратных связей (датчиков относительного положения звеньев манипулятора), включенных в контур регулирования. Поэтому роботы с позиционным управлением реализуют программы с гораздо более сложным циклом; чем роботы с цикловым управлением, работающие по механическим упорам. Программирование позиционных систем осуществляется обучением: в процессе ручного управления в память заносятся координаты позиций и порядок их обхода.
Проблему оснащения позиционных роботов рекуператорами энергии осложняет именно невозможность использования стационарных программно-управляемых упоров-фиксаторов. Вместо них можно использовать различные тормозные, а также программно-управляемые устройства, однако при этом необходимо решать задачу точности отработки программных значений обобщенных координат. Другая сложность связана с необходимостью соединения рекуператоров с кинематическими цепями приводов звеньев манипулятора управляемыми механизмами с очень малым временем срабатывания. Наконец, существенное значение имеют вопросы подзарядки рекуператоров.
Одним из вариантов технического решения проблемы является конструкция промышленного робота с позиционным управлением, кинематическая схема которого изображена на рис. 7.19, а.
Робот состоит из последовательно установленных на основании 1 и шарнирно соединенных между собой звеньев 2—8. Звено 2 посредством шарнира крепится на основании Там же установлены компенсирующий механизм, образованный рядом дифференциалов 15—20, и двигатели 12, связанные со звеньями манипулятора кинематическими цепями, выполненными, например, на конических передачах. Кроме того, на основании / установлены рекуператоры механической энергии 11, выполненные, например, в виде пружин кручения, выходные звенья рекуператоров 10. Механизмы реверса 13 установлены между выходными звеньями рекуператоров и кинематическими цепями приводов, в данном случае валами 9 двигателей 12. Программно-управляемые муфты 14 также установлены между выходными звеньями рекуператоров и кинематическими цепями приводов. Рекуператорами механиче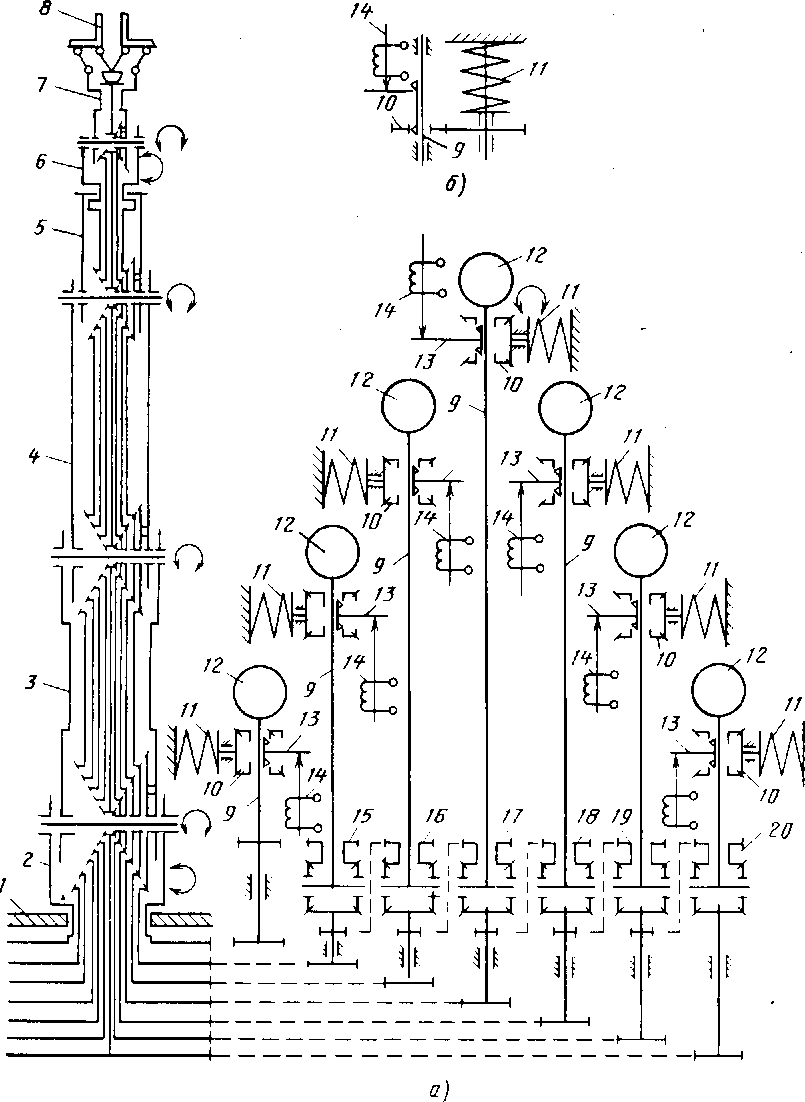 ской энергии могут быть оснащены приводы не всех звеньев,а только наиболее нагруженных, т. е. наиболее инерционных.
ской энергии могут быть оснащены приводы не всех звеньев,а только наиболее нагруженных, т. е. наиболее инерционных.
Позиционный промышленный робот с рекуператорами энергии работает следующим образом.
В исходном положении (перед началом работы) рекуператоры «заряжены», т. е. пружины сжаты, их состояния зафиксированы, например, с помощью специальных тормозных устройств (на схемах не показаны). При поступлении команды на отработку задаваемых перемещений включаются в требуемом направлении двигатели 12 и к валам 9 подключаются выходные звенья рекуператоров 10 с помощью программно-управляемых муфт’ 14 так, что направление моментов от рекуператоров 11 совпадает с направлением вращения валов Рис моментами двигателей 12. При этом происходит интенсивный разгон системы, переход потенциальной энергии пружин рекуператоров в кинетическую энергию звеньев. При отработке некоторой части требуемых перемещений программно-управляемые муфты по сигналам от системы управления переключают направление моментов от аккумуляторов с помощью механизма реверса на обратное. При этом в течение второй части такта движения направления моментов от рекуператоров не совпадают с направлениями скоростей валов Рис направлениями моментов двигателей 12. Происходит торможение системы, сопровождаемое зарядкой рекуператоров 11 и обратным переходом кинетической энергии системы в потенциальную энергию пружин. Энергия двигателей 12 расходуется на преодоление сил трения и подзарядку рекуператоров. В конце каждого такта состояние пружинных рекуператоров опять фиксируется тормозными устройствами.
В альтернативном вариант
Рисунок 18 7.19 Кинематическая сема робота с позиционным управлением
е подключения выходных звеньев рекуператоров к кинематическим цепям привода механизм реверса отсутствует (рис. 7.19, б). В этом случае для реверсирования момента аккумулятора используются собственные свойства колебательной системы пружина рекуператора — выходное звено рекуператора. Собственная частота этой системы значительно выше частоты системы рекуператор — звено робота. Поэтому при отключении ведомого звена рекуператора10 от вала 9 двигателя 12 и при последующем его включении через половину периода собственных колебаний системы «пружина — выходное звено рекуператора» пружина рекуператора перейдет из фазы растяжения в фазу сжатия лишь с незначительной потерей потенциала вследствие неточности включения и наличия явления затухания в системе. Эти потери компенсируются энергией, поступающей в систему «рекуператор — звено робота» на интервале движения от двигателя этой системы.
В заключение отметим, что идеи и методы рекуперации энергии для систем робототехники нашли внедрение в первых серийных образцах роботов циклового типа.
В настоящее время ПКТИ кузробот (г. Таганрог) выпущено два таких образца («Краб-рекупер» и «Старт-рекупер»), отличающихся грузоподъемностью и схемами исполнительных механизмов. Кроме того, в НРБ Институтом технической кибернетики и робототехники Болгарской Академии наук созданы роботы «Робко-М51» и «Робко-М52» также на принципах рекуперации. Причем робот «Робко-М52» обеспечивает значительное число точек позиционирования.