ВЫБОР ЭЛЕКТРОДВИГАТЕЛЯ. КИНЕМАТИЧЕСКИЕ РАСЧЕТЫ
Работу начинают с ознакомления с заданием на проект. Затем подбирают электродвигатель, определив сначала его мощность и частоту вращения ротора.
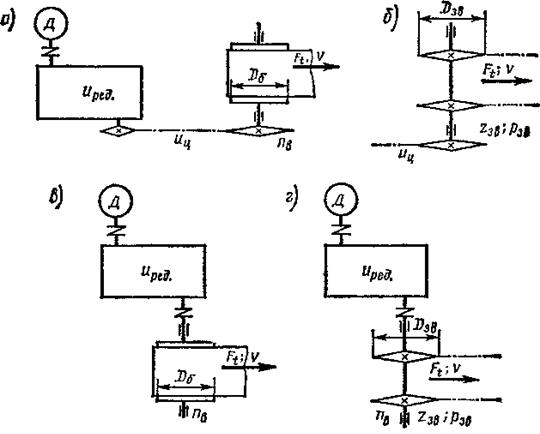
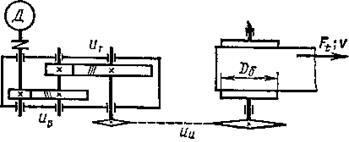
Подбор электродвигателя зависит от задания на проект. На рис. 1, а—г приведено несколько из возможных схем заданий. В этих случаях в задании сообщают окружную силу Ft на барабане привода ленточного конвейера или звездочке привода пластинчатого конвейера. Кроме того, в задании приводят скорость движения ленты или цепи υ, а также диаметр барабана Dб или число зубьев zзв и шаг рзв тяговых звездочек.
По этим данным учащийся определяет потребляемую мощность привода (мощность на выходе):
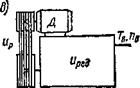
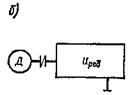
Задание на проект может представлять собою индивидуальный привод, состоящий из электродвигателя и редуктора или коробки передач, соединенных муфтой (рис. 1, а, б). Индивидуальный привод может состоять также из электродвигателя, ременной или цепной передачи и редуктора или коробки передач (рис. 1, в).
В таких заданиях в качестве исходных данных чаще всего приводят вращающий момент Твых (Н м) и частоту вращения выходного вала п вых (об/с или об/мин).
Мощность и вращающий момент связаны зависимостью

при п вых (об/с)

при п вых (об/мин)
После вычисления мощности Рвых (Вт) определяют потребную мощность электродвигателя
где 
Здесь η1, η2, η3 — КПД отдельных звеньев кинематической цепи, ориентировочные значения которых с учетом потерь в подшипниках можно брать из табл. 3.1
Таблица 3.1 – КПД отдельных звеньев кинематической цепи
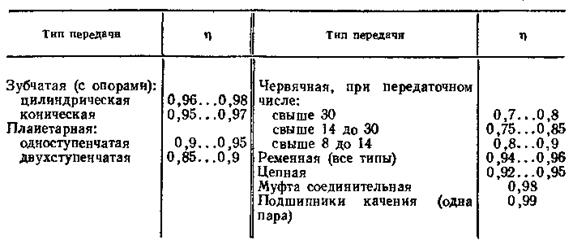
Если на данном этапе работы над проектом затруднительно определить передаточное число червячной передачи, предварительно следует принимать η ≈ 0,8.
Мощность электродвигателя в справочниках дана в киловаттах (кВт). Полученную расчетом мощность Рдв потр в ваттах следует перевести в киловатты; 1 кВт=10 3 Вт.
После определения потребной мощности электродвигателя нужно подобрать частоту вращения вала электродвигателя.
Обычно кинематическая схема приведена в задании. Тогда частота вращения вала электродвигателя
 …,
…,
 где и1, u2 . — передаточные числа кинематических пар изделия.
где и1, u2 . — передаточные числа кинематических пар изделия.
Если в задании указаны скорость движения ленты или тяговой цепи υ, а также диаметр Dб барабана или шаг р цепи и число зубьев z зв тяговой звездочки, то частота вращения приводного вала
 ,
, 
где Dб — диаметр барабана;
υ — скорость движения ленты (цепи);
рзв — шаг тяговой цепи;
zзв — число зубьев тяговой звездочки.
Рекомендуемые значения передаточных чисел и1, u2 . принимают из табл. 3.
Таблица 3.2 – Передаточные числа некоторых передач
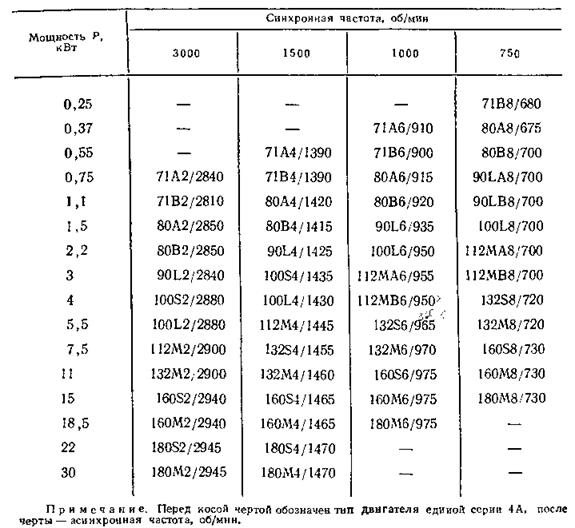
После этого по табл. 3.3 подбирают электродвигатель с мощностью Р и частотой вращения ротора п (об/мин) ближайшими к полученным ранее Рэ. потр и п э.
Таблица 3.3 – Двигатели закрытые обдуваемые
Пример 1. На рис. 3.3 приведена схема задания на проект. Исходные данные: Ft = 9800 Н; u = 0,63 м/с; Dб – 0,5 м. Термообработка колес – улучшение (твердость НВ<350).
Мощность на выходе

Общий КПД привода

где ηц.п — КПД цепной передачи;
ηоп — КПД опор (одна пара подшипников).

Потребная мощность электродвигателя

Частота вращения приводного вала (на выходе)

Подставляя в формулу для пэ из табл. 3 средние значения передаточных чисел цепной и двух зубчатых передач, получим

где u ц – передаточное число цепной передачи;
ит и иб — передаточные числа тихоходной и быстроходной ступеней зубчатых передач.
По полученным данным подбираем электродвигатель по табл. 3.3 Р = 7,5 кВт; n = 975 об/мин.
После выбора электродвигателя определяем общее передаточное число привода

Полученное ио бщ распределяют между типами и ступенями передач. Если по кинематической схеме, кроме зубчатых (червячных), имеются цепная или ременная передачи, то, принимая по табл. 3 передаточное число цепной иц или ир ременной передачи, находят передаточное число редуктора

Если в схеме привода отсутствуют ременная или цепная передача, то передаточное число редуктора иред = иобщ.
Передаточные числа одноступенчатых редукторов, проектируемых для серийного производства, должны иметь стандартные значения (ГОСТ 21426—75):

1-й ряд значений следует предпочитать 2-му; не рекомендуется применять для одноступенчатых редукторов передаточные числа и >5,0.
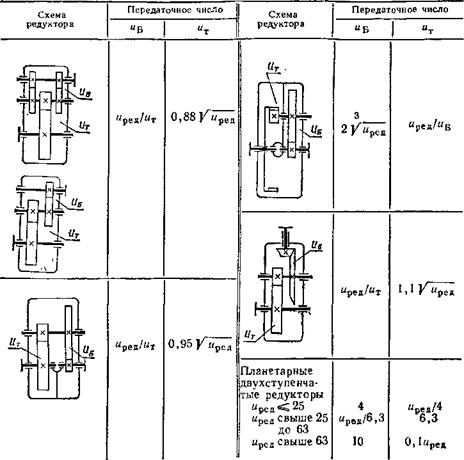
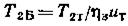
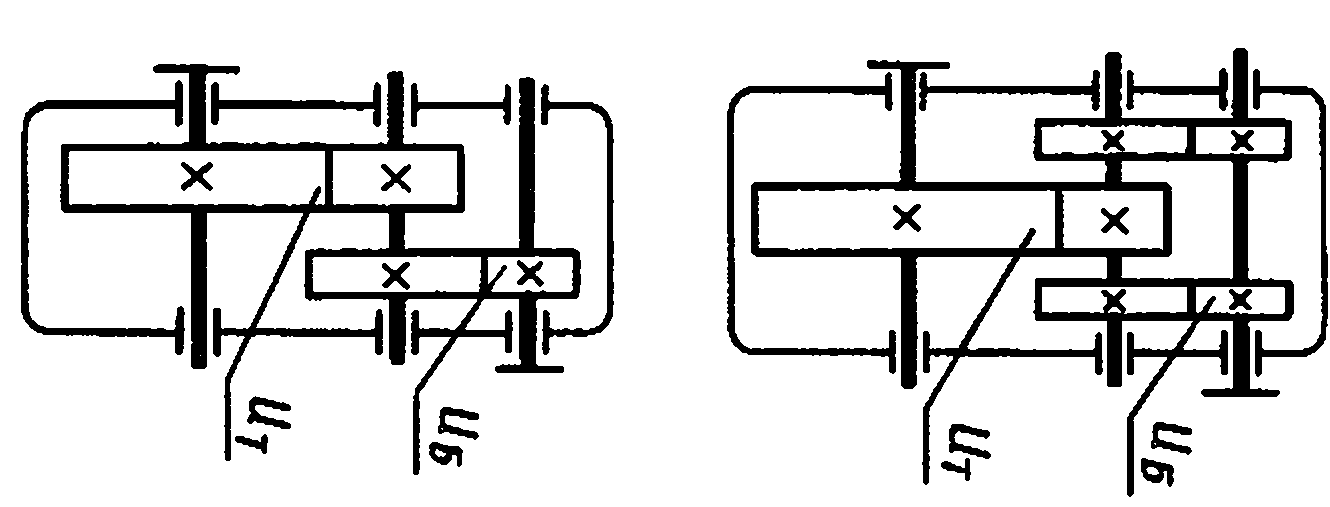
Передаточные числа двухступенчатых редукторов определяют по таблице 5 в зависимости от схемы редуктора
Ранее посчитано, что nвых = 24 об/мин, пэ = 975 об/мин,
Принимаем передаточное число цепной передачи иц = 2,5 (см. табл. 3.2),
Тогда передаточное число редуктора

По формуле из табл. 3.4 (если редуктор соответствует схеме из табл.3.4)

После определения передаточных чисел ступеней редуктора (коробки передач) находят частоты вращения и вращающие моменты на валах передачи.
Частота вращения вала колеса тихоходной ступени

Если в схеме задания на проект отсутствуют ременная или цепная передачи, то
Частота вращения вала колеса быстроходной ступени
Момент на приводном валу (на выходе)

где Ft — окружная сила на барабане или тяговой звездочке (см. рис. 3.3);
Dб — диаметр барабана;
 – диаметр тяговой звездочки.
– диаметр тяговой звездочки.
Момент на валу колеса тихоходной ступени редуктора
 ,
,
где ηц, ηр, иц, ир — КПД и передаточное число цепной или ременной передачи.
При отсутствии этих передач в схеме привода

Вращающий момент на валу колеса быстроходной ступени редуктора
где ηз — КПД зубчатой передачи тихоходной ступени редуктора.
Понравилась статья? Добавь ее в закладку (CTRL+D) и не забудь поделиться с друзьями:
1. Кинематический и силовой расчет привода. Выбор электродвигателя.
Мощность на валу электродвигателя передается всем приводом, состоящим из механической передачи (цепной, зубчатой, ременной) и редуктора. Ее значение определяют по данной мощности:
 , (1.1)
, (1.1)
где Р – требуемая мощность электродвигателя, кВт; Рвых – мощность на выходном валу привода, кВт; ηобщ – общий КПД привода;
 , (1.2)
, (1.2)
где η1, η2, …, ηn – КПД соответствующих передач и пар трения.
В зависимости от схемы задания КПД ступени могут быть приняты для следующих передач:
— закрытой зубчатой передачи с цилиндрическими колесами, η = 0,97…0,98;
— закрытой зубчатой передачи с коническими колесами, η = 0,96…0,97;
— зубчатой передачи с цилиндрическими колесами, сдвоенной η = 0,97;
— закрытой червячной передачи при числе заходов червяка, z = 1 – η = 0,70…0,75; z = 2 – η = 0,80…0,85; z = 4 – η = 0,80…0,95;
— закрытой зубчатой передачи с коническими колесами, η = 0,96…0,97;
— открытой зубчатой передачи, η = 0,95…0,96;
— ременной передачи с плоским ремнем, η = 0,96…0,98;
— ременной передачи с клиновым ремнем, η = 0,95…0,97;
— закрытой цепной передачи, η = 0,90…0,96;
— открытой цепной передачи, η = 0,70…0,88;
— одной пары подшипников η = 0,99;
— фрикционная передача, закрытая — η = 0,90…0,96; открытая — η = 0,70…0,88;
— волновая передача, η = 0,80…0,92;
— муфты соединительной, η = 0,99.
Приведенные значения КПД являются приближенными.
1.2. Выбор электродвигателя.
По найденному значению требуемой мощности Р подбирается электродвигатель и номинальная частота оборотов данного двигателя (см. табл. 1.1). Должно быть выполнено условие Р1 ≥ Р. Обычно выбирается ближайшее большее значение.
Электродвигатели асинхронные серии 4А по ГОСТ 19523-81
Мощность, P, кВт
Синхронная частота вращения, об/мин
1. Пример условного обозначения электродвигателя мощностью 11 кВт, синхронная частота вращения 1500 об/мин Электродвигатель 4А132М4У3
2. Значения символов в условных обозначениях: цифра 4 указывает порядковый номер серии; буква А – род двигателя – асинхронный. Следующие за буквой А числа (двух- или трехзначные) соответствуют высоте оси вращения, мм; буквы L, S и М относятся к установочным размерам по длине станины; буквы А и В – условные обозначения длины сердечника. Цифры 2, 4, 6 и 8 означают число полюсов. Последние два знака У3 показывают, что двигатель предназначен для эксплуатации в зоне умеренного климата.
Электродвигатели серии 4А. Основные размеры, мм

Габаритные размеры, мм
Установочные и присоединительные размеры, мм
1.3. Определение общего передаточного числа привода.
 , (1.3)
, (1.3)
где nдв – частота вращения двигателя, об/мин; nвых – частота вращения выходного вала привода, об/мин.
Частоту вращения выходного вала привода можно найти из формулы:
 , (1.4)
, (1.4)
где ωвых – частота вращения выходного вала привода, об/мин/
Общее передаточное число разбиваем по ступеням механических передач:
 , (1.5)
, (1.5)
где u1, u2, …, un – передаточные числа соответствующих передач.
Полученное расчетом общее передаточное число распределяют между редуктором и другими передачами, между отдельными ступенями редуктора.
Задаемся значением передаточного числа редуктора, выбирая его из таблицы 1.3.
Рекомендуемые значения передаточных чисел
Закрытые зубчатые передачи (редукторы) одноступенчатые цилиндрические и
конические ГОСТ 2185-66
Двухступенчатые редукторы ГОСТ 2185-66
Трехступенчатые редукторы ГОСТ 2185-66
Открытые зубчатые передачи
Значения 1-го ряда следует предпочитать значениям 2-го ряда.
Для двухступенчатой передачи (рис. 1.1):
 , (1.5)
, (1.5)
где  ,
, – передаточные числа быстроходной и тихоходной ступеней редуктора.
– передаточные числа быстроходной и тихоходной ступеней редуктора.

абв
Рисунок 1.1 – Схема цилиндрического (а,б) и коническо-цилиндрического редукторов (в).
Передаточные числа тихоходной ступени двухступенчатых редукторов определяют по соотношениям:
 , (1.6)
, (1.6)
 . (1.7)
. (1.7)
Передаточные числа быстроходной ступени двухступенчатых редукторов определяют по соотношениям:
 . (1.8)
. (1.8)
Значение оставшейся передачи (открытой зубчатой, цепной, ременной) определяем по формуле:
 , (1.6)
, (1.6)
1.4. Расчет мощности на валах привода.
Рассчитаем мощность на валах привода по следующим формулам:
РI=Рдв; РII=РI η1; РIII=РII
η1; РIII=РII η2; РIV=РIII
η2; РIV=РIII η3, (1.10)
η3, (1.10)
где Рдв – мощность выбранного электродвигателя, Вт; РI, РII, РIII, РIV – мощность на соответствующих ступенях привода, Вт; η1, η2, η3 – КПД соответствующих ступеней привода.
1.5. Расчет частоты вращения валов привода.
Определим частоту вращения валов привода по формулам:
 ;
;  ;
; ;
; , (1.11)
, (1.11)
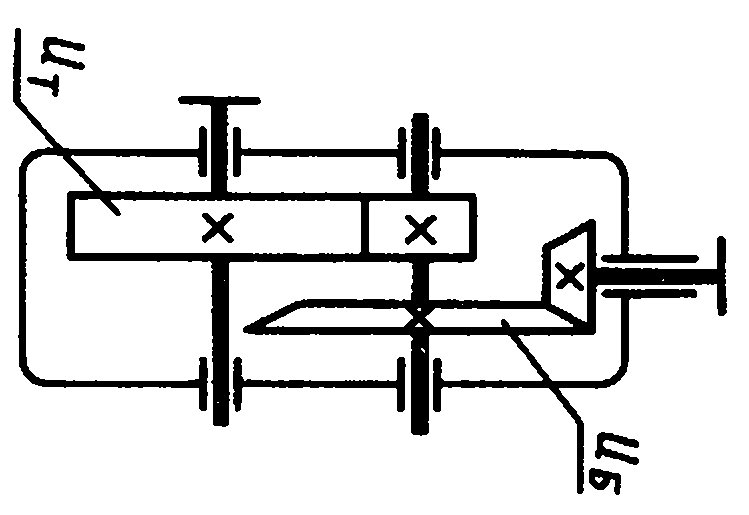
где пI, пII, пIII, пIV – частота вращения на соответствующих ступенях привода; ипер – передаточное число соответствующей передачи.
Для двухступенчатых редукторов частота вращения вала колеса тихоходной ступени:
 , (1.12)
, (1.12)
где uПП2 – передаточное число соответствующей промежуточной передачи от приводного вала до редуктора.
Если такая передача в схеме привода отсутствует, то пТ=пвых.
Частота вращения вала колеса промежуточной ступени:
 , (1.13)
, (1.13)
где uТ – передаточное число тихоходной ступени редуктора.
Частота вращения быстроходного вала:
 . (1.14)
. (1.14)
Частота вращения вала электродвигателя:
 . (1.15)
. (1.15)
где uПП1 – передаточное число соответствующей промежуточной передачи от электродвигателя до редуктора.
Если такая передача в схеме привода отсутствует, то пэл=пБ.
По рассчитанной мощности Рдв и частоте вращения вала электродвигателя nэд из табл. 1.1 окончательно выбирают электродвигатель таким образом, чтобы его номинальная частота nном вращения вала была самой близкой (из возможных вариантов) к большему значению диапазона nэд. В этом случае размеры и стоимость электродвигателя будут наименьшими. При этом следует иметь в виду, что большая частота вращения вала электродвигателя при одинаковой мощности вызывает увеличение передаточного числа редуктора, а, следовательно, увеличение его длины и высоты. Меньшая частота вращения вызывает увеличение размеров электродвигателя и увеличение ширины зубчатых колес, а, следовательно, уменьшение размеров редуктора.
1.6. Определение вращающих моментов.
Определяем вращающие моменты на всех валах привода по формулам:
 ,
,  , (1.16)
, (1.16)
Для многоступенчатых редукторов момент на быстроходном валу передачи определяется по формуле:
 , (1.17)
, (1.17)
где ип1 и ηп1 – передаточное число и КПД передачи, расположенной между электродвигателем и редуктором.
Если в схеме привода такая передача отсутствует, момент на быстроходном валу определяется:
 , (1.18)
, (1.18)
где ηм – КПД муфты, соединяющей валы электродвигателя и редуктора.
Момент на промежуточном валу передачи определяется по формуле:
 , (1.19)
, (1.19)
где иБ и ηЗБ – передаточное число и КПД быстроходной ступени.
Момент на тихоходном валу передачи определяется по формуле:
 , (1.20)
, (1.20)
где ηЗТ – КПД тихоходной ступени.
Момент на выходном валу определяется по формуле:
 , (1.21)
, (1.21)
где ип2 и ηп2 – передаточное число и КПД передачи, расположенной между выходным звеном и редуктором.
Если в схеме привода такая передача отсутствует, момент на выходном валу определяется:
 , (1.22)
, (1.22)
Кинематический и силовой расчет привода. Выбор электродвигателя
Мощность на валу электродвигателя передается всем приводом, состоящим из механической цепной передачи и редуктора. Ее значение определяют по мощности выходного вала — Рвых = 3,6 кВт:

, = 3,6 / 0,803 = 4,48(1.1)
где Р — требуемая мощность электродвигателя, кВт; Рвых — мощность на выходном валу привода, кВт; зобщ — общий КПД привода;

зобщ = 0,97 х 0, 96, х 0,88 х 0, 99 3 = 0,803
где з1, з2, …, зn — КПД соответствующих передач и пар трения:
— закрытой зубчатой передачи с цилиндрическими колесами, з = 0,97…0,98;
— закрытой зубчатой передачи с коническими колесами, з = 0,96…0,97;
— открытой цепной передачи, з = 0,70…0,88;
— одной пары подшипников з = 0,99;
Выбор электродвигателя
По найденному значению требуемой мощности Р подбираем электродвигатель и номинальную частоту оборотов данного двигателя (ГОСТ 19523-81, размеры двигателя приведены в табл. 1.1). Должно быть выполнено условие Р1 ? Р. Выбираем электродвигатель мощностью P = 5,5 квт с числом оборотов n = 1435 об/мин, марки 112М4:
Электродвигатель 4А112М4У3
Таблица 1.1. Электродвигатели серии 4А. Основные размеры, мм
Определение общего передаточного числа привода

где nдв — частота вращения двигателя, об/мин; nвых — частота вращения выходного вала привода, об/мин.
Частоту вращения выходного вала привода можно найти из формулы:

где щвых — частота вращения выходного вала привода, об/мин:
Отсюда число оборотов выходного вала равно:
nвых = 30 вых / = 30 х 4,3 / 3,14 = 41,082
Определяем общее передаточное число привода, исходя из выбранного значения числа оборотов двигателя:
uобщ = nдв / nвых = 1435 | 41,082 = 34,93(1.5)
Общее передаточное число разбиваем по ступеням механических передач:

где u1, u2, …, un — передаточные числа соответствующих передач
Полученное расчетом общее передаточное число распределяют между редуктором и другими передачами, между отдельными ступенями редуктора.
Задаемся значением передаточного числа двухступенчатого редуктора, выбирая их из таблицы 1.3: up = 16, тогда передаточное число открытой цепной передачи будет равно:
uц = uобщ / up = 34,93 / 16 = 2,18;
что соответствует рекомендованным значениям, указанным в табл. 1. 3 для цепных передач.
Таблица 1.3 Рекомендуемые значения передаточных чисел
Закрытые зубчатые передачи (редукторы) одноступенчатые цилиндрические и
конические ГОСТ 2185-66
Двухступенчатые редукторы ГОСТ 2185-66
Трехступенчатые редукторы ГОСТ 2185-66
Открытые зубчатые передачи
Для двухступенчатой передачи (рис. 1.1):

где , — передаточные числа быстроходной и тихоходной ступеней редуктора.

Рисунок 1.1 — Схема коническо-цилиндрического редуктора.
Передаточное число тихоходной цилиндрической ступени двухступенчатых коническо-цилиндрических редукторов определяют по соотношениям:

Передаточные числа быстроходной ступени двухступенчатых редукторов определяют по соотношениям:

Передаточные числа согласовываем со стандартными значениями согласно ГОСТ 12289 для конических передач и ГОСТ 2185 — цилиндрических передач и принимаем: ut = 4,5 uб = 3,55. Уточняем полученное передаточное число редуктора и цепной передачи

, = 4,5 х 3,55 = 15,975
uц = uобщ / up = 34,93 / 15,975 = 2,18
Расчет мощности на валах привода
Рассчитаем мощность на валах привода по следующим формулам:
где Рдв — мощность выбранного электродвигателя, Вт; РI, РII, РIII, РIV — мощность на соответствующих ступенях привода, Вт; з1, з2, з3 — КПД соответствующих ступеней привода.
Р1 = 5,5 кВт;
Р2 = Р1 х 1 п= 5,5 х 0,96 х 0,99= 5,22 кВт,
Р3 = Р2 2п = 5,22 х 0,97 х 0,99 = 5,01 кВт;
Р4 = Р3 3п = 5,22 х 0,88 х 0,99 = 4,54 кВт;
Расчет частоты вращения валов привода
Определим частоту вращения валов привода по формулам:




где пI, пII, пIII, пIV — частота вращения на соответствующих ступенях привода; ипер — передаточное число соответствующей передачи.
n1 = nдв = 1435 об/мин
n2 = n1 / uб = 1435 / 3,55 = 404,2
n3 = n2 / uт = 404,2 / 4,5 = 89,82
n2 = n1 / uб = 89,82/ 2,18 = 41,2
Определение вращающих моментов
Определяем вращающие моменты на всех валах привода по формулам:


где ипер и зпер — передаточное число и КПД передачи, расположенной между электродвигателем и редуктором.
М1 = Мдв = Рдв/дв = Рдв /( n/30) = 5500 / (3,14 х 1435/30) = 36,67 Н м
М2 = М1 uб зБ зп = 36,67 3,55 0,96 0,99 = 123,7 Н м
М3 = М2 uт зЕ зп = 123,7 4,5 0,97 0,99 = 534,55 Н м
М4 = М3 uц зп = 534,55 2,18 0,88 0,99 = 1025,48 Н м
Энергетический расчёт и выбор на этой основе исполнительных двигателей
Разберём, как можно выбрать исполнительные двигатели для своего проекта, самоделки и иных целей. Будет использоваться подход к синтезу, который получил название синтеза цифровой системы по ее непрерывному аналогу. Начальным этапом процесса проектирования является выполнение энергетического расчёта и выбор на этой основе исполнительных двигателей, механических передач и силовых преобразователей (усилителей мощности), в совокупности обеспечивающих возможность реализации силового воздействия на объект управления.
1. Энергетический расчёт.
Целью энергетического расчета является рациональный выбор исполнительных элементов приводов системы, которые обладают энергетическими возможностями для обеспечения механического объекта управления по заданному закону во всех предусмотренных режимах работы. Задача энергетического расчета состоит в анализе сил (моментов сил) и скоростей, которые должны развивать приводы системы и выборе исполнительных элементов, энергетически обеспечивающих возможность получения требуемых сил и скоростей движения механических объектов управления и удовлетворяющих заданным критериям эффективности такого выбора.
Считаем, что динамическая жёсткость приводов бесконечно высока и поэтому взаимовлияние степеней подвижности манипулятора не проявляется. Тогда можно считать, что при движении одного из звеньев второе звено остаётся неподвижным.
Примем себе техническое задание:
Спроектировать привода для двухзвенного плоского манипулятора робота. Возьмём для этого упрощенную модель двухзвенного механизма манипулятора (рис.1), имеющего «плечевое» и «локтевое» звенья, причем рабочий орган (РО) условно считается закрепленным непосредственно на конце «локтевого» звена.

Рисунок 1.Расчётная кинематическая схема манипуляционного механизма.
На рисунке приняты обозначения:
q1 и q2 — обобщённые координаты манипуляционного механизма. Они представляют собой углы поворота «плечевого» и «локтевого» звеньев манипулятора, соответственно. Угол q1 определяется как отклонение «плечевого» звена от вертикали, а угол q2 определяется как отклонение «локтевого» звена от продольной оси «плечевого» звена. Положительные значения этих углов соответствуют вращению звеньев по часовой стрелке;
L1 и L2 — длины «плечевого» и «локтевого» звеньев, соответственно. L2 — расстояние от оси поворота «локтевого» звена до центра масс рабочего органа с объектом манипулирования;
m1 и m2 — массы «плечевого» и «локтевого» звеньев, соответственно.
Считается, что каждая из этих масс сосредоточена в центре соответствующего звена;
m0 — суммарная масса рабочего органа и объекта манипулирования;
mДВ1 и mДВ2 — массы исполнительных двигателей;
V и a — скорость и ускорение конечной точки манипулятора соответственно;
R — расстояние от оси вращения «плечевого» звена до конечной точки манипулятора;
M1 и M2 — моменты сил, развиваемые приводами и действующие на звенья манипулятора.