Что такое скольжение асинхронного двигателя и как оно определяется
Под скоростью вращения асинхронного электродвигателя обычно понимают угловую частоту вращения его ротора, которая приведена на шильдике (на паспортной табличке двигателя) в виде количества оборотов в минуту. Трехфазный двигатель можно питать и от однофазной сети, для этого достаточно добавить конденсатор параллельно одной или двум его обмоткам, в зависимости от напряжения сети, но конструкция двигателя от этого не изменится.

Так, если ротор под нагрузкой совершает 2760 оборотов в минуту, то угловая частота данного двигателя будет равна 2760*2пи/60 радиан в секунду, то есть 289 рад/с, что не удобно для восприятия, поэтому на табличке пишут просто «2760 об/мин». Применительно к асинхронному электродвигателю, это обороты с учетом скольжения s.
Синхронная же скорость данного двигателя (без учета скольжения) будет равна 3000 оборотов в минуту, поскольку при питании обмоток статора сетевым током с частотой 50 Гц, каждую секунду магнитный поток будет совершать по 50 полных циклических изменений, а 50*60 = 3000, вот и получается 3000 оборотов в минуту — синхронная скорость асинхронного электродвигателя.
В рамках данной статьи мы поговорим о том, как определить синхронную скорость вращения неизвестного асинхронного трехфазного двигателя, просто взглянув на его статор. По внешнему виду статора, по расположению обмоток, по количеству пазов, — можно легко определить синхронные обороты электродвигателя если у вас нет под рукой тахометра. Итак, начнем по порядку и разберем данный вопрос с примерами.
3000 оборотов в минуту
Про асинхронные электродвигатели (смотрите — Виды электродвигателей) принято говорить, что тот или иной двигатель имеет одну, две, три или четыре пары полюсов. Минимум — одна пара полюсов, то есть минимум — два полюса. Взгляните на рисунок. Здесь вы видите, что в статор уложено по две последовательно соединенные катушки на каждую фазу — в каждой паре катушек одна расположена напротив другой. Эти катушки и образуют по паре полюсов на статоре.
Одна из фаз показана для ясности красным цветом, вторая — зеленым, третья — черным. Обмотки всех трех фаз устроены одинаково. Поскольку три эти обмотки питаются по очереди (ток трехфазный), то за 1 колебание из 50 в каждой из фаз — магнитный поток статора один раз обернется на полные 360 градусов, то есть совершит один оборот за 1/50 секунды, значит 50 оборотов получится за секунду. Так и выходит 3000 оборотов в минуту.
Таким образом становится ясно, что для определения синхронных оборотов асинхронного электродвигателя достаточно определить количество пар его полюсов, что легко сделать, сняв крышку и взглянув на статор.
Общее число пазов статора разделите на число пазов, приходящихся на одну секцию обмотки одной из фаз. Если получится 2, то перед вами двигатель с двумя полюсами — с одной парой полюсов. Следовательно синхронная частота составляет 3000 оборотов в минуту или примерно 2910 с учетом скольжения. В простейшем случае 12 пазов, по 6 пазов на катушку, и таких катушек 6 — по две на каждую из трех фаз.
Обратите внимание, количество катушек в одной группе для одной пары полюсов может быть не обязательно 1, но и 2 и 3, однако для примера мы рассмотрели вариант с одиночными группами на пару катушек (не будем в рамках данной статьи заострять внимание на способах намотки).
1500 оборотов в минуту
Для получения синхронной скорости в 1500 оборотов в минуту, количество полюсов статора увеличивают вдвое, чтобы за 1 колебание из 50 магнитный поток совершил бы только пол оборота — 180 градусов.
Для этого на каждую фазу делают по 4 секции обмотки. Таким образом, если одна катушка занимает четверть всех пазов, то перед вами двигатель с двумя парами полюсов, образованными четырьмя катушками на фазу.
Например, 6 пазов из 24 занимает одна катушка или 12 из 48, значит перед вами двигатель с синхронной частотой 1500 оборотов в минуту, или с учетом скольжения примерно 1350 оборотов в минуту. На приведенном фото каждая секция обмотки выполнена в виде двойной катушечной группы.
1000 оборотов в минуту
Как вы уже поняли, для получения синхронной частоты в 1000 оборотов в минуту, каждая фаза образует уже три пары полюсов, чтобы за одно колебание из 50 (герц) магнитный поток обернулся бы всего на 120 градусов, и соответствующим образом повернул бы за собой ротор.
Таким образом, минимум 18 катушек установлены на статор, причем каждая катушка занимает шестую часть всех пазов (по шесть катушек на фазу — по три пары). Например, если пазов 24, то одна катушка займет 4 из них. Получится частота с учетом скольжения около 935 оборотов в минуту.
750 оборотов в минуту
Для получения синхронной скорости в 750 оборотов в минуту, необходимо, чтобы три фазы формировали на статоре четыре пары движущихся полюсов, это по 8 катушек на фазу — одна напротив другой — 8 полюсов. Если например на 48 пазов приходится по катушке на каждые 6 пазов — перед вами асинхронный двигатель с синхронными оборотами 750 (или около 730 с учетом скольжения).
500 оборотов в минуту
Наконец, для получения асинхронного двигателя с синхронной скоростью в 500 оборотов в минуту необходимо 6 пар полюсов — по 12 катушек (полюсов) на фазу, чтобы на каждое колебание сети магнитный поток поворачивался бы на 60 градусов. То есть, если например статор имеет 36 пазов, при этом на катушку приходится по 4 паза — перед вами трехфазный двигатель на 500 оборотов в минуту (480 с учетом скольжения).
Смотрите также: Как отличить асинхронный двигатель от двигателя постоянного тока
Как определить частоту вращения электродвигателя?
Очевидно, что правильная эксплуатация любой электрической машины предполагает соответствие такого важного ее технического параметра как частота вращения условиям эксплуатации.
Все основные параметры асинхронного электродвигателя изготовителем указываются на металлической бирке – шильдике, прикрепленной к его корпусу. И конечно, в приведенных технических данных обязательно присутствует информация о частоте вращения при номинальной нагрузке.
Однако, на практике, совсем нередки случаи, когда необходимо определить частоту вращения двигателя с отсутствующим шильдиком или с нечитаемыми – стершимися надписями на нем.
Конечно, в таких случаях опытный мастер-электроприводчик, наверняка сможет определить частоту вращения, но у начинающих специалистов-электриков, занимающихся обслуживанием электрического оборудования при решении этого вопроса могут возникнуть некоторые затруднения.
Проще всего определить скорость вращения вала работающего “асинхронника” тахометром. Но, учитывая, что ввиду узкой специфики использования, наличие этого измерительного прибора – большая редкость, данный метод здесь не рассматривается.
Надеемся, предложенный ниже способ окажется полезным. Он применим для асинхронных электродвигателей небольшой и средней мощности, имеющих однослойные статорные обмотки.
Итак, в нашем случае определение частоты вращения электродвигателя предполагает осмотр его статорной обмотки. Поэтому, с двигателя потребуется снять крышку (пошипниковый щит). Если на его валу закреплены шкив или полумуфта для передачи движения, то рекомендуем снять задний щит.
Сняв крышку и крыльчатку вентилятора с вала, следует, открутив винты, снять задний подшипниковый щит, после чего осмотреть торцевую часть статорной обмотки. Далее, надо посчитать количество пазов, занимаемых секциями одной катушки.
Общее количество пазов сердечника, разделенное на количество пазов, занимаемых секциями одной катушки (частное) составит число полюсов. Зная его значение, определяем частоту вращения асинхронного электродвигателя:
2 – 3000 об/мин; 4 – 1500 об/мин; 6 – 1000 об/мин.
Здесь стоит учесть одну особенность асинхронных двигателей – несоответствие скорости вращения магнитного поля и вращения ротора, поэтому скорость может составлять 940 обмин вместо 1000 или 2940 об/мин вместо 3000.
Как видно, особой сложностью этот способ определения частоты вращения по обмотке не отличается, однако, может быть упрощен; потребуется визуально определить какая часть окружности сердечника статора, занимается секциями одной катушки:
Занятая секциями одной катушки ½ часть сердечника статора двигателя свидетельствует о его частоте вращения 3000 обмин, ⅓ – 1500 об/мин, ¼ – 1000 об/мин.
>Как определить мощность и обороты электродвигателя без его разборки.
Как узнать характеристики электродвигателя без маркировки.
Что это такое
Принцип работы трехфазного асинхронного двигателя довольно прост. На обмотку статора подается питающее напряжение, которое создает магнитный поток, в каждой фазе он будет смещен на 120 градусов. При этом суммирующий магнитный поток будет вращающимся.
Обмотка ротора является замкнутым контуром, в ней наводится ЭДС и возникающий магнитный поток придает вращение ротору, в направлении движения магнитного потока статора. Вращающий электромагнитный момент пытается уравнять скорости вращения магнитных полей статора и ротора.
Величина определяющая разность скоростей вращения магнитных полей ротора и статора, называется скольжение. Так как ротор асинхронного двигателя всегда вращается медленнее, чем поле статора — оно обычно меньше единицы. Может измеряться в относительных единицах или процентах.
Высчитывается она по формуле:
где n1— это частота вращения магнитного поля, n2 – частота вращения магнитного поля ротора.
Скольжение, это важная характеристика, характеризующая нормальную работу асинхронного электродвигателя.
Электродвигатели в составе мотор-редукторов.
Электрические двигатели уже давно стали включаться в состав различных мотор-редукторов. Они находят свое применение как в трёхступенчатых типа МЦ3У. так и в двухступенчатых типа МЦ2У. Электромоторы имеют практически 90%-ный коэффициент полезного действия, не требуют постоянного обслуживания. Немаловажным параметром является и исключительная экологичность электрического мотора, вредные выхлопы отсутствуют вовсе, что делает его незаменимым при установке внутри помещения. Словом, в настоящее время электромоторы признаны в 3, а то и в 4 раза эффективнее традиционных двигателей внутреннего сгорания.
Но иногда, в случае выхода из строя электродвигателя, покупатель узнает, что абсолютно никакой сопроводительной документации к нему не прилагается. Маркировочные шильды, если и сохранились, могут находиться в изношенном потертом состоянии, так, что ничего на них рассмотреть попросту бывает невозможно. Как же в таком случае можно определить мощность двигателя и число его оборотов? Здесь поэтапно будут приведены советы, которые помогут это сделать.
Следует иметь в виду, что под числом оборотов подразумевается так называемая асинхронная скорость. Синхронная скорость это скорость вращения магнитного поля. Асинхронная скорость несколько ниже синхронной из-за наличия массы у вращательного элемента, а также воздействия сил трения, которые могут значительно понизить КПД мотора. Впрочем, на практике эти различия практически никогда не имеет решающего значения.
Сейчас на рынке представлено 3 основные категории асинхронных электродвигателей. Первая категория каталога – моторы, работающие при 1000 оборотах. На практике это число составляет порядка 950-970 оборотов, но для наглядности все-таки округляют до тысячи. Вторая категория моторы, выдающие 1500 об/мин. Это также округлено, так как в действительности диапазон лежит в пределах 1430-1470. Третья 3000 оборотов в минуту. Хотя реально такой мотор выдает 2900-2970 вращений.
Способы измерения
Существует несколько способов измерения скольжения асинхронного двигателя. Если частота вращения значительно отличается от синхронной, то ее можно измерить с помощью тахометра или тахогенератора, подключенного на валу ЭД.
Вариант измерения стробоскопическим методом с помощью неоновой лампы подходит при величине скольжения не более 5%. Для этого на валу двигателя либо наносят мелом специальную черту, либо устанавливают специальный стробоскопический диск. Освещают их неоновой лампой, и отсчитывают вращение за определенное время, потом, по специальным формулам производят вычисления. Также возможно использование полноценного стробоскопа, подобно тому что показано ниже.
Также, для измерения величины скольжения всех видов машин подходит способ индуктивной катушки. Катушку лучше всего использовать от реле или контактора постоянного тока, из-за количества витков (там 10-20 тысяч), количество витков должно быть не менее 3000. Катушку с подключенным к ней чувствительным милливольтметром, располагают у конца вала ротора. По отклонениям стрелки прибора (числу колебаний) за определенное время высчитывают по формуле величину скольжения. Помимо этого, у асинхронного двигателя с фазным ротором скольжение можно замерить с помощью магнитоэлектрического амперметра. Амперметр подключается к одной из фаз ротора и по числу отклонений стрелки амперметра производят вычисления (по формуле из способа с индуктивной катушкой).
Вот мы и рассмотрели, что собой представляет скольжение асинхронного двигателя и как его определить. Если остались вопросы, задавайте их в комментариях под статьей!
В результате взаимодействия магнитного поля с токами в роторе асинхронного двигателя создается вращающий электромагнитный момент, стремящийся уравнять скорость вращения магнитного поля статора и ротора.
Способы определения характеристик электромотора.
Чтобы определить, к какой из этих групп относится двигатель, не нужно разбирать его, как это советуют некоторые специалисты, чтобы обеспечить себе заказ на работу. Дело в том, что разбор электродвигателя может осуществить только мастер достаточной квалификации. На самом же деле достаточно открыть защитную крышку (другое название подшипниковый щит) и найти катушку обмотки. Таких катушек может быть несколько, но достаточно одной. В случае если к валу прикреплены полумуфта или шкив, потребуется снять еще и нижний щит.
Если катушки соединены при помощи деталей, которые мешают рассмотреть информацию, эти детали ни в коем случае нельзя отсоединять. Нужно попробовать определить на глаз соотношение размера катушки и статора.
Статором называется неподвижная часть электромотора, подвижная же имеет название ротор. В зависимости от конструктивных особенностей, в качестве ротора может выступать как сама катушка, так и магниты.
Если катушка закрывает собой половину кольца статора, такой двигатель относится к третьей группе, то есть способен выдавать до 3000 оборотов. Если размер катушки составляет треть от размеров кольца, это мотор второго типа, соответственно, он способен развить 1500 оборотов в минуту. Наконец, если катушка только на четверть закрывает собой кольцо, это первый тип. Электромотор развивает мощность в 1000 оборотов.
Существует еще один способ определения частоты вращения вала роторной части. Для этого также нужно снять крышку и найти верхнюю часть обмотки. По расположению секций обмотки и определяется скорость. Обычно внешняя секция занимает 12 пазов. Если сосчитать общее количество пазов и разделить на 12, можно получить число полюсов. Если число полюсов равно 2, двигатель имеет скорость вращения около 3000 об/мин. Если полюсов получилось 4, это соответствует 1500 оборотам в минуту. Если 6, то 1000 об/мин. Если 8, то 700 оборотов.
Третий способ определения количества оборотов внимательно осмотреть бирку на самом двигателе. Цифра на маркировке в конце и соответствует числу полюсов. Например, для маркировки АИР160S6 последняя цифра 6 указывает, сколько полюсов использует катушка.
Проще же всего измерить число оборотов специальным прибором тахометром. Но в силу узкой специализации применения данный способ нельзя рассматривать как общедоступный. Таким образом, даже если не сохранилось никакой технической документации, существует как минимум 4 способа определить число оборотов электрического мотора.
Величина скольжения в разных режимах работы
В режиме холостого хода скольжение близко к нулю и составляет 2-3%, ввиду того, что n1 почти равняется n2. Нулю оно не может быть равным, потому как в этом случае поле статора не пересекает поле ротора, простыми словами, двигатель не вращается и питающее на него напряжение не подается.
Даже в режиме идеального холостого хода, величина скольжения, выраженная в процентах, не будет равной нулю. S может принимать и отрицательные значения, в том случае, когда электродвигатель работает в генераторном режиме.
В генераторном режиме (вращение ротора противоположно направлению поля статора) скольжение ЭД будет в значениях -∞
Поэтому, для детального исследования характеристик АД устанавливается зависимость, изображенная на рисунке выше. Таким образом, изменение момента (при различных значениях скольжения) в АД с фазным ротором может регулироваться путем ввода сопротивления в цепь обмоток ротора. В электродвигателях с короткозамкнутым ротором момент вращения регулируется или с помощью преобразователей частоты или использованием двигателей с переменными характеристиками.
При номинальной нагрузке электродвигателя значение скольжения будет в диапазоне 8%-2% (для двигателей малой и средней мощности), номинальное скольжение.
При увеличении нагрузки на валу (момента на валу) будет увеличиваться скольжение, простым языком, магнитное поле ротора будет все сильнее отставать (тормозить) от магнитного поля статора. Увеличение скольжения (S) приведет к пропорциональному увеличению тока ротора, следовательно, пропорционально увеличится момент. Но при этом увеличиваются активные потери в роторе (увеличивается сопротивление), которые уменьшают рост силы тока, поэтому момент увеличивается медленнее, чем скольжение.
При определенной величине скольжения момент достигнет максимального значения, потом начнет снижаться. Величину, при которой момент будет максимальным, называют критической (Sкр).
В графической форме механическую характеристику асинхронного электродвигателя можно выразить с помощью формулы Клосса:
где, Мк — это критический момент, который определяется критическим скольжением электродвигателя.
График строится исходя из характеристик, указанных в паспорте АД. При возникновении вопросов по приводу, в качестве движителя, использующего асинхронный электродвигатель, используется данный график.
Критический момент определяет величину допустимой мгновенной перегрузки электродвигателя. При развитии момента более критического (следовательно, более критического скольжения) происходит, так называемое, опрокидывание электродвигателя и двигатель останавливается. Опрокидывание — один из аварийных режимов.
Как самостоятельно узнать число оборотов электродвигателя
Зачастую, покупая с рук электродвигатель, автовладелец (и не только) в последующем обнаруживает, что к нему нет никакой документации. В таком случае, как правило, приходится самостоятельно определять обороты электродвигателя, а многие, как свидетельствует практика, не знают, как это сделать. Данная статья расскажет, как определить обороты электродвигателя самостоятельно и, что следует при этом знать.
Пошаговая инструкция определения оборотов
1. На сегодняшний день асинхронные электродвигатели подразделяются на три группы, каждая из которых говорит об индивидуальном обращении ротора в минуту. Первая группа – электродвигатели, делающие 1000 оборотов в минуту. Стоит сразу заметить, что данная цифра немного преувеличена, так как двигатель асинхронный.
Он делает, как правило, около 950-970 оборотов, но для удобства специалисты такие цифры решили округлить. Ко второй группе относятся двигатели, количество обращений ротора которых составляет 1500 за минуту. Эта цифра так же округленная, на самом деле электродвигатель делает 1430—1470 оборотом в минуту.
Третья группа асинхронных электродвигателей – это группа, к которой относится деталь, ротор которой оборачивается вокруг себя три тысячи раз за одну минуту. Реальная цифра оборотов – 2900-2970.
2. Для того, чтобы определить обороты электродвигателя, вам сначала нужно выявить, к какой же именно из указанных выше групп он относится. Для этого откройте одну из его крышек и найдите под низом катушку обмотки. Помните, такая катушка может состоять, как из одной детали, так и из нескольких, в частности трех-четырех. Кроме всего прочего знайте, что подобных катушек в электродвигателе может быть несколько. Вам достаточно одной, до которой, чтобы рассмотреть, нужно меньше всего прикладывать усилий.
3. Внимание! Катушки между собой связаны определенными деталями, которые иногда мешают рассмотреть нужную информацию. Ни при каких обстоятельствах нельзя отсоединять ничего друг от друга. Внимательно приглядитесь к выбранной вами детали и попробуйте приблизительно определить размер катушки относительно кольца статора.
4. Данное расстояние, чтобы узнать обороты электродвигателя, вовсе не нужно определять до точности. Приблизительные расчеты подойдут вам.
Если размер катушки, примерно, закрывает собой половину кольца статора, то скорость вращения ротора – три тысячи оборотов в минуту.
Если размер катушки покрывает, приблизительно, треть самого кольца, электродвигатель будет относиться ко второй группе и, следовательно, число оборотов, которые он сможет совершать, не будет превышать отметки 1500 за минуту.
Когда размер катушки равен одной четвертой по отношению к кольцу – число оборотов электродвигателя будет 1000 оборотов за одну минуту и, соответственно, двигатель будет относиться к третьей группе.
Не забывайте, что указанные цифры – это всего лишь приблизительная картина вращения, в реальности они могут отличаться и это зависит от множества факторов.
Эти статьи вам тоже пригодятся:
Теперь посмотрите это полезное видео:
- Японская техника изготовления цветов из лент – канзаши
Многие наверняка видели и уже имеют в своем гардеробе такие замечательные аксессуары из цветов канзаши. Эта статья научит вас технике их изготовления. Цветы из атласных лент – канзаси.
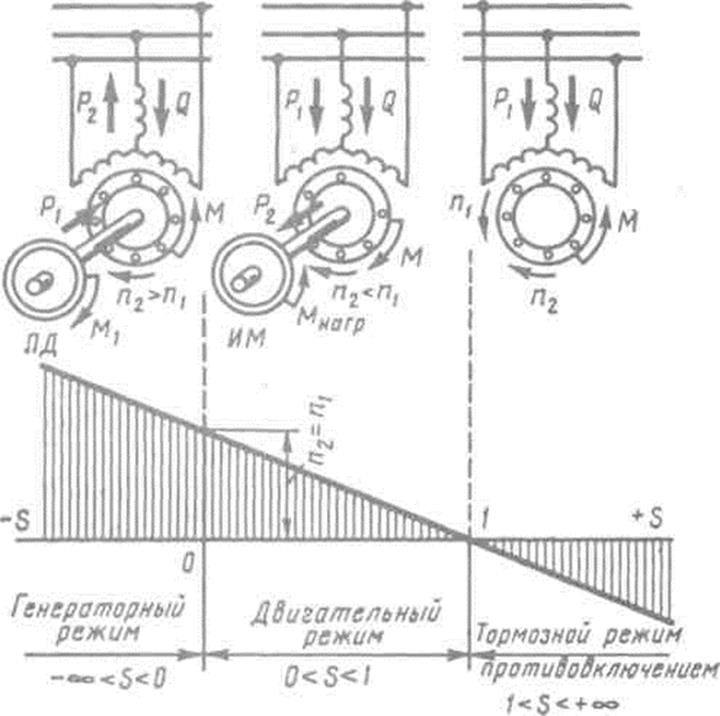
Скольжение асинхронной машины в режиме двигателя
Двигательный режим. При включении обмотки статора в сеть трехфазного тока возникает вращающееся магнитное поле, которое, сцепляясь с короткозамкнутой обмоткой ротора, наводит в ней ЭДС. При этом в стержнях обмотки ротора появляются токи (см. рис. 6.4). В результате взаимодействия этих токов с вращающимся магнитным полем на роторе возникают электромагнитные силы. Совокупность этих сил создает электромагнитный вращающий момент, под действием которого ротор асинхронного двигатели приходит во вращение с частотой п2< п1 в сторону вращения поля статора. Если вал асинхронного двигателя механически соединить с валом какого-либо исполнительного механизма ИМ (станка, подъемного крана и т. п.), то вращающий момент двигателя М, преодолев противодействующий (нагрузочный) момент Мнагр исполнительного механизма, приведет механизм во вращение. Следовательно, электрическая мощность Ри поступающая в двигатель из сети, в основной своей части преобразуется в механическую мощность /^ и передается исполнительному механизму ИМ (рис. 10.1, б).
Весьма важным параметром асинхронной машины является скольжение — величина, характеризующая разность частот вращения ротора и вращающегося поля статора:
Скольжение выражают в долях единицы либо в процентах. В последнем случае величину, полученную по (10.1), следует умножить на 100.
Вполне очевидно, что с увеличением нагрузочного момента на валу асинхронного двигателя частота вращения ротора п2 уменьшается. Следовательно, скольжение асинхронного двигателя зависит от механической нагрузки на валу двигателя и может изменяться в диапазоне 0 < s < 1.
При включении асинхронного двигателя в сеть в начальный момент времени ротор под влиянием сил инерции неподвижен
(«2 = 0). При этом скольжение s равно единице. В режиме работы двигателя без нагрузки на валу (режим холостого хода) ротор вращается с частотой лишь немного меньшей синхронной частоты вращения n1 и скольжение весьма мало отличается от нуля (s «0). Скольжение, соответствующее номинальной нагрузке двигателя, называют номинальным скольжением sH0M. Для асинхронных двигателей общего назначения sH0M = 1/8%, при этом для двигателей большой мощности SHOM = 1%, а для двигателей малой мощности
Преобразовав выражение (10.1), получим формулу для определения асинхронной частоты вращения (об/мин):
Рис. 10.1. Режимы работы асинхронной машины
 Пример 10.1. Трехфазный асинхронный двигатель с числом полюсов 2р = 4 работает от сети с частотой тока f1 = 50 Гц. Определить частоту вращения двигателя при номинальной нагрузке, если скольжение при этом составляет 6%.
Пример 10.1. Трехфазный асинхронный двигатель с числом полюсов 2р = 4 работает от сети с частотой тока f1 = 50 Гц. Определить частоту вращения двигателя при номинальной нагрузке, если скольжение при этом составляет 6%.
Решение. Синхронная частота вращения
п1 = f1 • 60/р = 50 • 60/4 = 1500 об/мин.
Номинальная частота вращения по (10.2)
nном = n1(1-sном) = 1500(1 -0,06) = 1412 об/мин.
Понравилась статья? Добавь ее в закладку (CTRL+D) и не забудь поделиться с друзьями:
Что такое скольжение асинхронного двигателя
В результате взаимодействия магнитного поля с токами в роторе асинхронного двигателя создается вращающий электромагнитный момент, стремящийся уравнять скорость вращения магнитного поля статора и ротора.
Разность скоростей вращения магнитного поля статора и ротора асинхронного двигателя характеризуется величиной скольжения s = (n 1 — n 2 ) / n 1, где n 1 — синхронная скорость вращения поля, об/мин, n2 — скорость вращения ротора асинхронного двигателя, об/мин. При работе с номинальной нагрузкой скольжение обычно мало, так для электродвигателя, например, с n 1 = 1500 об/мин, n2 = 1 460 об/мин, скольжение равно: s = ((1500 — 1460) / 1500) х 100 = 2,7%

Асинхронный двигатель не может достичь синхронной скорости вращения даже три отсоединенном механизме, так как при ней проводники ротора не будут пересекаться магнитным полем, в них не будет наводиться ЭДС и не будет тока. Асинхронный момент при s = 0 будет равен нулю.
В начальный момент пуска в обмотках ротора протекает ток с частотой сети. По мере ускорения ротора частота тока в нем будет определяться скольжением асинхронного двигателя : f2 = s х f1, где f1 — частота тока, подводимого к статору.
Сопротивление ротора зависит от частоты тока в нем, причем чем больше частота, тем больше его индуктивное сопротивление. С увеличением индуктивного сопротивления ротора увеличивается сдвиг фаз между напряжением и током в обмотках статора.
При пуске асинхронных двигателей коэффициент мощности поэтому значительно ниже, чем при нормальной работе. Величина тока определяется эквивалентным значением сопротивления электродвигателя и приложенным напряжением.
Величина эквивалентного сопротивления асинхронного двигателя с изменением скольжения изменяется по сложному закону. При уменьшении скольжения в пределах 1 — 0,15 сопротивление увеличивается, как правило, не более чем в 1,5 раза, в пределах от 0,15 до s н ом в 5-7 раз по отношению к начальному значению при пуске.
Ток по величине изменяется обратно пропорционально изменению эквивалентного сопротивления Таким образом, при пуске до скольжения порядка 0,15 ток опадает незначительно, а в дальнейшем быстро уменьшается.
Момент вращения может быть также определен по электромагнитной мощности на валу как отношение этой мощности к угловой скорости ротора. Величина момента пропорциональна квадрату напряжения и обратно пропорциональная квадрату частоты.
 Характерными значениями момента в зависимости от скольжения (или скорости) являются начальное значение момента (когда электродвигатель еще неподвижен), максимальное значение момента (и соответствующее ему сколь жение, называемое критическим) и минимальное значение момента в пределе скоростей от неподвижного состояния до номинальной .
Характерными значениями момента в зависимости от скольжения (или скорости) являются начальное значение момента (когда электродвигатель еще неподвижен), максимальное значение момента (и соответствующее ему сколь жение, называемое критическим) и минимальное значение момента в пределе скоростей от неподвижного состояния до номинальной .
З начения момента для номинального напряжения приводятся в каталогах для электрических машин. Знание минимального момента необходимо при расчете допустимости пуска или самозапуска механизма с полной нагрузкой механизма. Поэтому его значение для конкретных расчетов должно быть либо определено, либо получено от завода-поставщика.
Величина максимального значения момента определяется индуктивным сопротивлением рассеяния статора и ротора и не зависит от величины сопротивления ротора.
Критическое скольжение определяется отношением сопротивления ротора к эквивалентному сопротивлению (обусловлено активным сопротивлением статора и индуктивным сопротивлением рассеяния статора и ротора).
Увеличение только активного сопротивления ротора сопровождается увеличением критического скольжения и перемещением максимума момента в область более высоких скольжений (меньшей скорости вращения). Таким путем может быть достигнуто изменение характеристик моментов.
Изменение скольжения возможно увеличением сопротивления цени ротора или потока. Первый вариант осуществим только для асинхронных двигателей с фазным ротором (от S = 1 до S = Sном ) , но не экономичен. Второй вариант осуществим при изменении питающего напряжения, но только в сторону уменьшения. Диапазон регулирования мал, так как S возрастает, но одновременно уменьшается перегрузочная способность асинхронного двигателя. По экономичности оба варианта, примерно, равноценны.
В асинхронных двига т елях с фазным ротором изменение момента при различных скольжениях осуществляется с помощью сопротивления, вводимого в цепь обмотки ротора. В асинхронных двигателях с короткозамкнутым ротором изменение момента может быть достигнуто за счет применения двигателей с переменными параметрами или с помощью частотных преобразователей .
В результате взаимодействия магнитного поля с токами в роторе асинхронного двигателя создается вращающий электромагнитный момент, стремящийся уравнять скорость вращения магнитного поля статора и ротора.
Разность скоростей вращения магнитного поля статора и ротора асинхронного двигателя характеризуется величиной скольжения s = (n 1 — n 2 ) / n 1, где n 1 — синхронная скорость вращения поля, об/мин, n2 — скорость вращения ротора асинхронного двигателя, об/мин. При работе с номинальной нагрузкой скольжение обычно мало, так для электродвигателя, например, с n 1 = 1500 об/мин, n2 = 1 460 об/мин, скольжение равно: s = ((1500 — 1460) / 1500) х 100 = 2,7%
Асинхронный двигатель не может достичь синхронной скорости вращения даже три отсоединенном механизме, так как при ней проводники ротора не будут пересекаться магнитным полем, в них не будет наводиться ЭДС и не будет тока. Асинхронный момент при s = 0 будет равен нулю.
В начальный момент пуска в обмотках ротора протекает ток с частотой сети. По мере ускорения ротора частота тока в нем будет определяться скольжением асинхронного двигателя : f2 = s х f1, где f1 — частота тока, подводимого к статору.
Сопротивление ротора зависит от частоты тока в нем, причем чем больше частота, тем больше его индуктивное сопротивление. С увеличением индуктивного сопротивления ротора увеличивается сдвиг фаз между напряжением и током в обмотках статора.
При пуске асинхронных двигателей коэффициент мощности поэтому значительно ниже, чем при нормальной работе. Величина тока определяется эквивалентным значением сопротивления электродвигателя и приложенным напряжением.
Величина эквивалентного сопротивления асинхронного двигателя с изменением скольжения изменяется по сложному закону. При уменьшении скольжения в пределах 1 — 0,15 сопротивление увеличивается, как правило, не более чем в 1,5 раза, в пределах от 0,15 до s н ом в 5-7 раз по отношению к начальному значению при пуске.
Ток по величине изменяется обратно пропорционально изменению эквивалентного сопротивления Таким образом, при пуске до скольжения порядка 0,15 ток опадает незначительно, а в дальнейшем быстро уменьшается.
Момент вращения может быть также определен по электромагнитной мощности на валу как отношение этой мощности к угловой скорости ротора. Величина момента пропорциональна квадрату напряжения и обратно пропорциональная квадрату частоты.
Характерными значениями момента в зависимости от скольжения (или скорости) являются начальное значение момента (когда электродвигатель еще неподвижен), максимальное значение момента (и соответствующее ему сколь жение, называемое критическим) и минимальное значение момента в пределе скоростей от неподвижного состояния до номинальной .
З начения момента для номинального напряжения приводятся в каталогах для электрических машин. Знание минимального момента необходимо при расчете допустимости пуска или самозапуска механизма с полной нагрузкой механизма. Поэтому его значение для конкретных расчетов должно быть либо определено, либо получено от завода-поставщика.
Величина максимального значения момента определяется индуктивным сопротивлением рассеяния статора и ротора и не зависит от величины сопротивления ротора.
Критическое скольжение определяется отношением сопротивления ротора к эквивалентному сопротивлению (обусловлено активным сопротивлением статора и индуктивным сопротивлением рассеяния статора и ротора).
Увеличение только активного сопротивления ротора сопровождается увеличением критического скольжения и перемещением максимума момента в область более высоких скольжений (меньшей скорости вращения). Таким путем может быть достигнуто изменение характеристик моментов.
Изменение скольжения возможно увеличением сопротивления цени ротора или потока. Первый вариант осуществим только для асинхронных двигателей с фазным ротором (от S = 1 до S = Sном ) , но не экономичен. Второй вариант осуществим при изменении питающего напряжения, но только в сторону уменьшения. Диапазон регулирования мал, так как S возрастает, но одновременно уменьшается перегрузочная способность асинхронного двигателя. По экономичности оба варианта, примерно, равноценны.
В асинхронных двига т елях с фазным ротором изменение момента при различных скольжениях осуществляется с помощью сопротивления, вводимого в цепь обмотки ротора. В асинхронных двигателях с короткозамкнутым ротором изменение момента может быть достигнуто за счет применения двигателей с переменными параметрами или с помощью частотных преобразователей .
Что это такое
Принцип работы трехфазного асинхронного двигателя довольно прост. На обмотку статора подается питающее напряжение, которое создает магнитный поток, в каждой фазе он будет смещен на 120 градусов. При этом суммирующий магнитный поток будет вращающимся.
Обмотка ротора является замкнутым контуром, в ней наводится ЭДС и возникающий магнитный поток придает вращение ротору, в направлении движения магнитного потока статора. Вращающий электромагнитный момент пытается уравнять скорости вращения магнитных полей статора и ротора.
Величина определяющая разность скоростей вращения магнитных полей ротора и статора, называется скольжение. Так как ротор асинхронного двигателя всегда вращается медленнее, чем поле статора — оно обычно меньше единицы. Может измеряться в относительных единицах или процентах.
Высчитывается она по формуле:

где n1— это частота вращения магнитного поля, n2 – частота вращения магнитного поля ротора.
Скольжение, это важная характеристика, характеризующая нормальную работу асинхронного электродвигателя.
Величина скольжения в разных режимах работы
В режиме холостого хода скольжение близко к нулю и составляет 2-3%, ввиду того, что n1 почти равняется n2. Нулю оно не может быть равным, потому как в этом случае поле статора не пересекает поле ротора, простыми словами, двигатель не вращается и питающее на него напряжение не подается.
Даже в режиме идеального холостого хода, величина скольжения, выраженная в процентах, не будет равной нулю. S может принимать и отрицательные значения, в том случае, когда электродвигатель работает в генераторном режиме.
В генераторном режиме (вращение ротора противоположно направлению поля статора) скольжение ЭД будет в значениях -∞
Поэтому, для детального исследования характеристик АД устанавливается зависимость, изображенная на рисунке выше. Таким образом, изменение момента (при различных значениях скольжения) в АД с фазным ротором может регулироваться путем ввода сопротивления в цепь обмоток ротора. В электродвигателях с короткозамкнутым ротором момент вращения регулируется или с помощью преобразователей частоты или использованием двигателей с переменными характеристиками.
При номинальной нагрузке электродвигателя значение скольжения будет в диапазоне 8%-2% (для двигателей малой и средней мощности), номинальное скольжение.
При увеличении нагрузки на валу (момента на валу) будет увеличиваться скольжение, простым языком, магнитное поле ротора будет все сильнее отставать (тормозить) от магнитного поля статора. Увеличение скольжения (S) приведет к пропорциональному увеличению тока ротора, следовательно, пропорционально увеличится момент. Но при этом увеличиваются активные потери в роторе (увеличивается сопротивление), которые уменьшают рост силы тока, поэтому момент увеличивается медленнее, чем скольжение.
При определенной величине скольжения момент достигнет максимального значения, потом начнет снижаться. Величину, при которой момент будет максимальным, называют критической (Sкр).
В графической форме механическую характеристику асинхронного электродвигателя можно выразить с помощью формулы Клосса:

где, Мк — это критический момент, который определяется критическим скольжением электродвигателя.
График строится исходя из характеристик, указанных в паспорте АД. При возникновении вопросов по приводу, в качестве движителя, использующего асинхронный электродвигатель, используется данный график.
Критический момент определяет величину допустимой мгновенной перегрузки электродвигателя. При развитии момента более критического (следовательно, более критического скольжения) происходит, так называемое, опрокидывание электродвигателя и двигатель останавливается. Опрокидывание — один из аварийных режимов.

Способы измерения
Существует несколько способов измерения скольжения асинхронного двигателя. Если частота вращения значительно отличается от синхронной, то ее можно измерить с помощью тахометра или тахогенератора, подключенного на валу ЭД.
Вариант измерения стробоскопическим методом с помощью неоновой лампы подходит при величине скольжения не более 5%. Для этого на валу двигателя либо наносят мелом специальную черту, либо устанавливают специальный стробоскопический диск. Освещают их неоновой лампой, и отсчитывают вращение за определенное время, потом, по специальным формулам производят вычисления. Также возможно использование полноценного стробоскопа, подобно тому что показано ниже.
Также, для измерения величины скольжения всех видов машин подходит способ индуктивной катушки. Катушку лучше всего использовать от реле или контактора постоянного тока, из-за количества витков (там 10-20 тысяч), количество витков должно быть не менее 3000. Катушку с подключенным к ней чувствительным милливольтметром, располагают у конца вала ротора. По отклонениям стрелки прибора (числу колебаний) за определенное время высчитывают по формуле величину скольжения. Помимо этого, у асинхронного двигателя с фазным ротором скольжение можно замерить с помощью магнитоэлектрического амперметра. Амперметр подключается к одной из фаз ротора и по числу отклонений стрелки амперметра производят вычисления (по формуле из способа с индуктивной катушкой).
Вот мы и рассмотрели, что собой представляет скольжение асинхронного двигателя и как его определить. Если остались вопросы, задавайте их в комментариях под статьей!
Особенности определение скольжения асинхронного двигателя классическим методом
Скольжение — это одна из основных характеристик асинхронных двигателей, иными словами скольжение асинхронного двигателя — это относительная разность скоростей вращения ротора и магнитного потока, создаваемого обмотками статора двигателя переменного тока. Скольжение может измеряться в относительных единицах и в процентах. Она изменяется в зависимости от режима работы, нагрузки на валу и питающего напряжения. Учитывая важность вышесказанного в данной работе рассмотрена подробность о скольжение асинхронных двигателей и от чего оно зависит и как определяется совершенно простым путем.
1. Маджидов А.Ш. Уравнения асинхронного электродвигателя при переходном процессе / А.Ш. Маджидов // Информационные технологии, энергетика и экономика (электроэнергетика, электротехника и теплоэнергетика, математическое моделирование и информационные технологии в производстве): сборник трудов XVII Международной научно-технической конференции студентов и аспирантов, Смоленск, 16–17 апреля 2020 г. / ФГБОУ ВО «НИУ «МЭИ», филиал в г. Смоленске. – Смоленск: Универсум, 2020. – С. 44–49.
2. Abdullo M. Features of the mathematical equations of asynchronous motors in the transient process / M. Abdullo, K. Nurzat. – April 22–23, 2021. – P. 116–121.
3. Маджидо А.Ш. Учет асинхронного электродвигателя с неизменным скольжением при внезапном трехфазном коротком замыкании / А.Ш. Маджидов, Г.М. Султаналиева, Э.М. Султаналиева // Актуальные проблемы современной науки: взгляд молодых ученых: Материалы Международной научно-практической конференции. Материалы круглого стола, Грозный, 29–30 мая 2020 г. – Грозный: Чеченский государственный педагогический университет, 2020. – С. 651–657.
4. Majidov A. Investigation of the Self-Starting Process of a Low-Power Asynchronous Motor / A. Majidov, A.G. Kayumov, S. Hafizov //Proceedings of the 2021 IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering, ElConRus 2021, Moscow, January 26–28, 2021. – Moscow, 2021. – P. 1462–1468. – DOI: 10.1109/ElConRus51938.2021.9396181.
5. Маджидов А.Ш. Сравнение методов определения энергоэффективности асинхронных двигателей / А.Ш. Маджидов, А.З. Джавахян // XI Международная интернет-конференция молодых ученых, аспирантов и студентов «Инновационные технологии: теория, инструменты, практика» (InnoTech-2019). – Пермь, 2019. – С. 163–167.
6. Маджидов А.Ш. Особенности выбора асинхронных двигателей с короткозамкнутым ротором по пусковым характеристикам / А.Ш. Маджидов, Н.К. Каныбекова // Информационные технологи, энергетика и экономика (электроэнергетика, электротехника и теплоэнергетика, математическое моделирование и информационные технологии в производстве): сборник трудов XVIII Международной научно-технической конференции студентов и аспирантов: в 3 т., Смоленск, 22–23 апреля 2021 г. – Смоленск: Универсум, 2021. – С. 206–212.
7. Маджидов А.Ш. Анализ пусковых характеристик асинхронного двигателя с учетом изменения скорости вращения / А.Ш. Маджидов // Научная инициатива иностранных студентов и аспирантов: сборник докладов I Международной научно-практической конференции. В 2 т., Томск, 27–29 апреля 2021 г. – Томск: Национальный исследовательский Томский политехнический университет, 2021. – С. 178–187.
8. Маджидов А.Ш. Моделирование асинхронного двигателя на основе схемы замещения в программе ETAP / А.Ш. Маджидов // Энергетика, информатика, инновации – 2020: Сборник трудов X Национальной научно-технической конференции с международным участием. В 3 т., Смоленск, 3–4 декабря 2020 г. – Смоленск: Универсум, 2020. – С. 301–306.
9. Majidov A. Comparative Study of Calculation Methods for Short-Circuit Currents in Low-Voltage Networks with Asynchronous Motors / A. Majidov, A.G. Kayumov, N. Kholov // Proceedings of the 2021 IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering, ElConRus 2021, Moscow, January 26–28, 2021. – Moscow, 2021. – P. 1469–1475. – DOI 10.1109/ElConRus51938.2021.9396624.
10. Mathematical modeling of asynchronous motors for calculating short-circuit currents / A. Majidov, S. Hafizov, T. Isaev [et al.] // Proceedings of the 3rd 2021 International Youth Conference on Radio Electronics, Electrical and Power Engineering, REEPE 2021: 3, Moscow, March 11–13, 2021. – Moscow, 2021. – P. 9388065. – DOI: 10.1109/REEPE51337.2021.9388065.
Вращение большинства механизмов собственных нужд (СН) электростанций и подстанций (ЭС и ПС) осуществляется с помощью электрических приводов, а именно – асинхронными двигателями (АД) с короткозамкнутым ротором, т. к. эти АД считаются самыми распространенными, которые дают возможность пуска от полного напряжения сети без специальных пусковых устройств. Другое преимущество этих АД – восстанавливать нормальный режим работы после глубоких понижений питающего напряжения, которые считаются самозапуском АД [1, 3, 5].
Для механизмов СН ЭС и ПС важно рассчитать токи и напряжение на выводах АД при различных механических нагрузках. Расчет статического режима разветвленной электрической цепи решается методами теории цепей [2, 4] и путем определения расчетного сопротивления АД в цепи. Эти АД в схеме представлены Т-образными или Г-образными схемами замещения [6, 7, 9], которая показана на рис. 1.
Уравнениям ЭДС и токов соответствует эквивалентная схема замещения, как показано на рис. 1. Таким образом, сложную магнитную цепь АД можно заменить электрической схемой. Сопротивление r’2 /s можно рассматривать как внешнее сопротивление, включенное в обмотку ротора. Оно является единственным переменным параметром схемы. Изменение этого сопротивления эквивалентно изменению нагрузки на валу АД и приводит к изменению s. Тогда не сложно угадать, что скольжение АД в зависимости от нагрузки меняется незначительно (1–6%) [8]. Чем больше мощность АД, тем меньше его s.
Определение эквивалентного сопротивления этих цепей в основном поддерживается необходимостью определения расчетного скольжения АД, которое в простейшем случае представляет собой функцию механической нагрузки (момент сопротивления вращению рабочей машины), амплитуду, частоту и напряжение на обмотке статора [10]. На скольжение могут влиять несимметричность трехфазного напряжения, несинусоидальное напряжение, случайные изменения механической нагрузки [2, 6, 9]. Погрешность определения скольжения 0,001 отн. ед. приводит к значительному увеличению погрешности конечных результатов расчета электрических цепей из-за накопления ошибок в многодвигательном приводе, а также к итерационным расчетам при использовании совместно с методами численных расчетов, при которых накапливается ошибка вычислений.